


ホーム >
センサ フュージョン > 軽量高速多指ハンドシステム
軽量高速多指ハンドシステム
概要
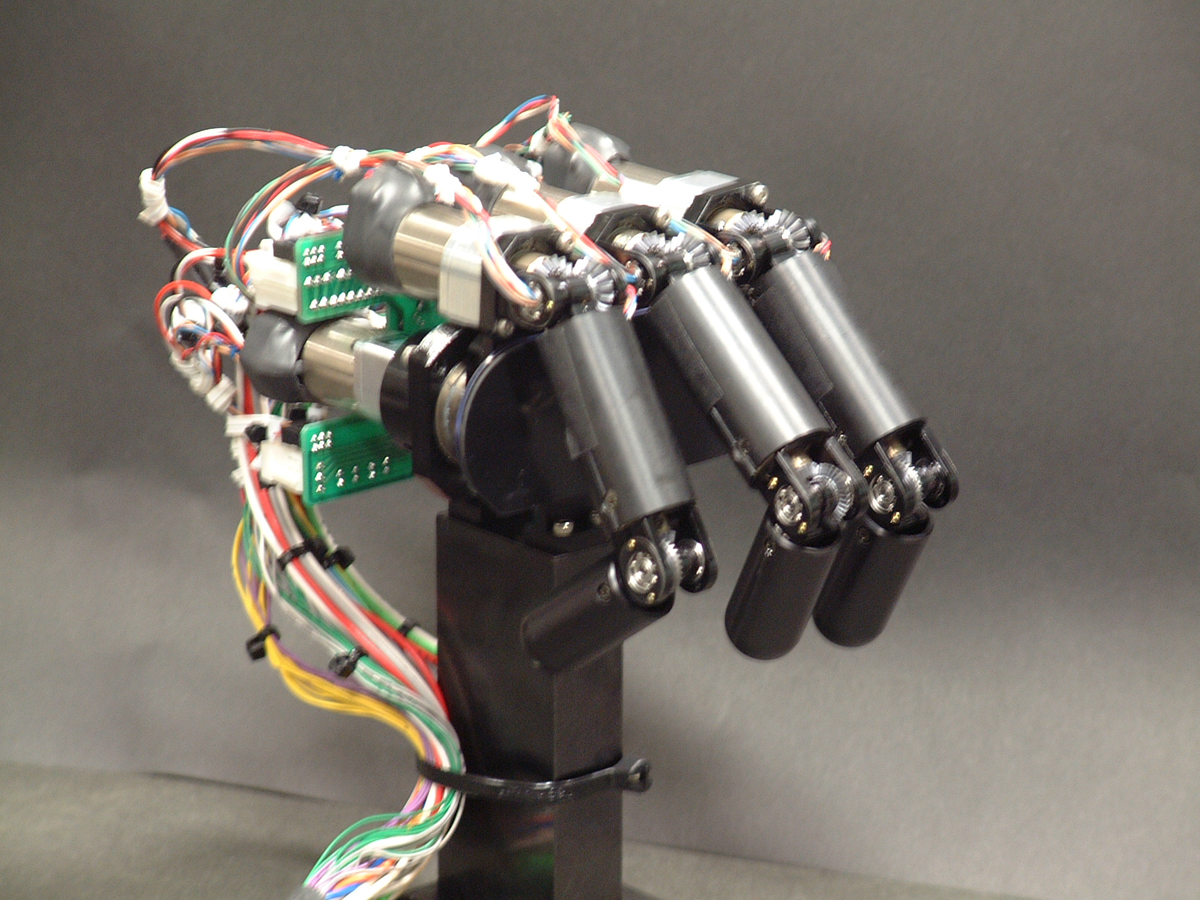
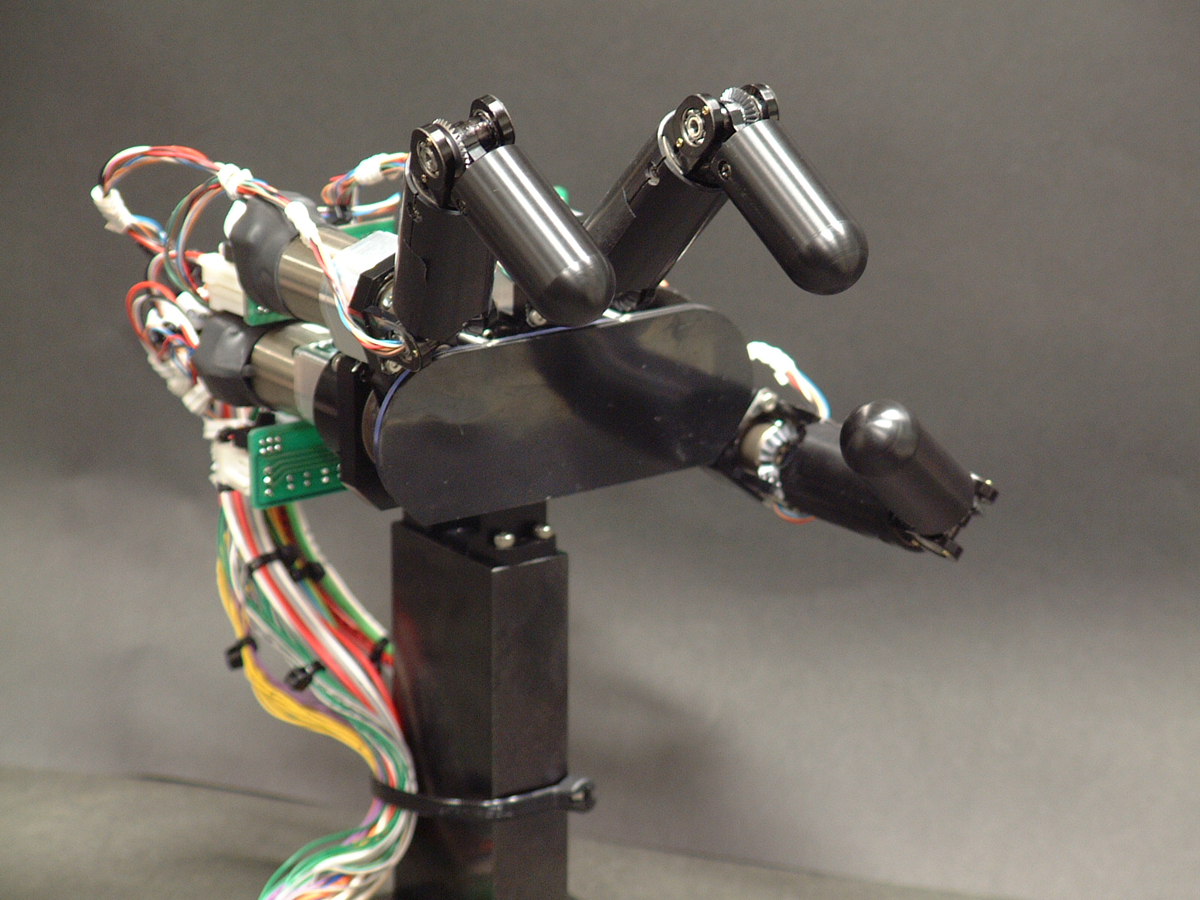
従来より,器用で柔軟な把握機能の実現を目指して,多指ロボットハンドの研究が進められてきたが, そのほとんどは準静的な手の運動を対象としており,その動作速度はそれほど速くはなかった. しかし,人間の把握動作では,眼の機能と合わせた高速で動的な操りが大きな役割を果たしている. 現状の技術の進展から,工学的ハンドシステムにおいては,原理上, 同様の動作を人間よりも速い速度で実現できるはずである.
そこで我々の研究室では,機械システム並びに視覚システムの速度限界を追求し, 超高速の領域で,人間と同様な目と手の協調動作を実現した.視覚システムとして, 1msで汎用画像処理が実現可能なビジョンチップシステムを用い, 機械システムとしてのロボットハンドには新たに開発した軽量・高トルクモータを用いることにより, 機械システム限界に迫る速度(180度開閉を0.1秒で実行可能)を実現することに成功した.
開発したハンドを用いて,様々なタスクが実現されている.
- [ Dynamic Regrasping ]
- [ Dynamic Pen Spinning ]
- [ Dynamic Dribbling ]
- [ Dynamic Catching ]
落ちてくるボール(約4m/s)を指先でつまむという人間にはできないタスクを実現した. ここで,つかむ瞬間は0.01秒にも満たない超高速動作であり, 人間の目に見えない速度でタスクが実現されている.
(本ハンドは,ハーモニック・ドライブ・システムズの協力を得て製作されました)



把握形態
動画
関連研究
参考文献
- Akio Namiki, Yoshiro Imai, Masatoshi Ishikawa, and Makoto Kaneko : Development of a High-speed Multifingered Hand System and Its Application to Catching, 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (Las Vegas, 2003.10.30)/pp.2666-2671 [ PDF format ]
- Akio NAMIKI, Yoshiro IMAI, Masatoshi ISHIKAWA, Makoto KANEKO, Hiroshi KAMEDA, and Junji KOYAMA : Dynamic Catching Using a Ultra-High-Speed Multifingered Hand System, 2003 IEEE International Conference on Robotics and Automation (Taipei, Taiwan, 2003.9.17)/Video Proceedings, Abstracts & References, pp.28-29
- 並木明夫, 石川正俊, 金子真, 亀田博, 小山順二:軽量高速多指ロボットハンドの開発, 日本機械学会ロボティクス・メカトロニクス講演会'03 (函館, 2003)/講演論文集, 1P1-1F-G3 [PDF format ]
- 今井睦朗, 並木明夫, 橋本浩一, 石川正俊:高速多指ハンドによる動的捕球動作の実現, 日本機械学会ロボティクス・メカトロニクス講演会'03 (函館, 2003)/講演論文集, 1P1-1F-G2 [PDF format ]
- 並木明夫, 今井睦朗, 石川正俊:捕球動作のための視覚フィードバック制御, 計測自動制御学会システムインテグレーション部門講演会 (神戸, 2002.12.20)/講演論文集, Vol. 2, pp. 219-220
- 今井睦朗, 並木明夫, 橋本浩一, 金子真, 石川正俊: 視覚フィードバックを用いた高速ハンドシステムの開発, 日本ロボット学会創立20周年記念学術講演会 (大阪, 2000. 10. 14)/講演論文集, 3E11
- 並木明夫, 亀田博, 小林清人, 坂田順, 金子真, 石川正俊: 軽量高速ロボット指モジュールの開発, 日本機械学会ロボティクス・メカトロニクス講演会'02 (松江, 2002. 6. 9)/講演論文集, 2P2-F04 [ PDF 形式 ]