研究成果集
|
印刷
|
お問い合わせ
|
English
ジャンプ
ホーム
研究
センサフュージョン
ダイナミックビジョンシステム
システムビジョンデザイン
アクティブパーセプション
研究室
所在地・アクセス
メンバー
受章・受賞
研究室の沿革
プロジェクト・研究設備
資料
論文・メディア等
研究成果集
動画・YouTube
基本概念・用語
ページ
関連リンク
サイト内検索
更新履歴
ローカル (メンバーのみ)
ホーム
>
センサーフュージョン
>
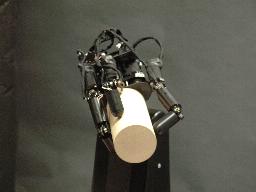
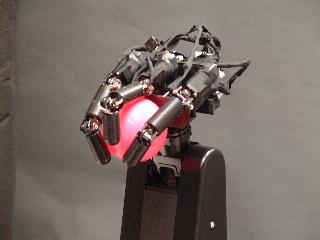
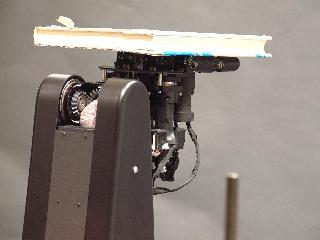
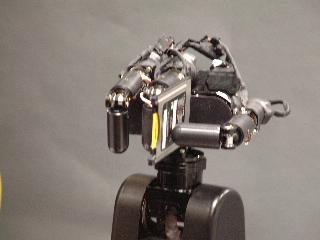
高速多指ハンド
> 把握形態
把握形態
ホーム
研究
センサ フュージョン
ダイナミック
ビジョン システム
システム ビジョン デザイン
アクティブ
パーセプション
研究室
所在地・アクセス
メンバー
受章・受賞
研究室
の
沿革
プロジェクト・研究設備
資料
論文・メディア等
研究成果集
動画・YouTube
基本概念・用語
ページ
関連リンク
サイト内検索
更新履歴
ローカル
(メンバーのみ)
東京理科大学
研究推進機構
総合研究院
石川グループ研究室
Ishikawa Group Laboratory WWW admin:
contact
Copyright
©
2008 Ishikawa Group Laboratory. All rights reserved.