


高速多指ハンドを用いたダイナミックキャッチング
概要
0.1 秒で指の180度開閉動作が実行可能な, 新しい高速多指ロボットハンドが開発されている. これにサイクルタイム1msの高速視覚フィードバックシステムを適用することにより, これまでのロボットハンドには不可能であった様々な動的操作が可能になる. ここでは,動的操作の一例として,落下物体の捕球動作を取り上げる.
落下球の能動的キャッチング動作
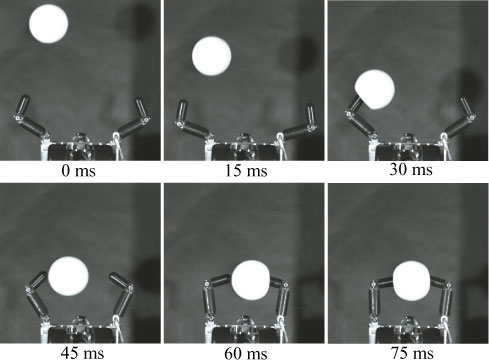
約1[m]の高さから落下するゴムボールを,2本指を用いて捕球する. 落下位置は2本の指のちょうど中心とは限らず, 指の設置された直線上においていくらかのずれがあるとする.このような場合, 落ちてきたそのままの位置で安定して把持することは難しい.しかし, 球と指との衝突現象をうまく利用することにより, 安定しやすい2本指の中心位置に球を追い込み,捕球を成功させる. このような能動的な捕球戦略は,対象の動きに対して受動的な捕球動作と比較して, 捕球の可能性を広げることができるものと考えられる. 高速ビジョンシステムを用いて球の3次元位置情報をフィードバックしながらハンドを制御し, このタスクを実現した.
落下円柱の能動的キャッチング動作
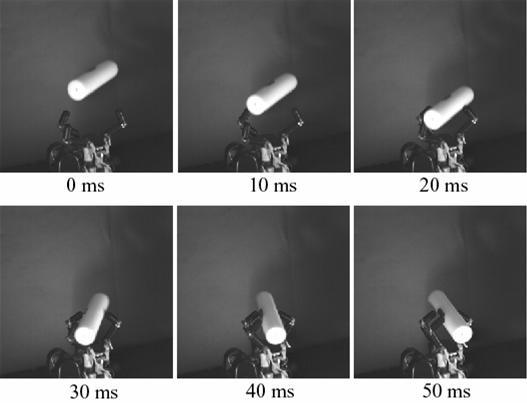
約1[m]の高さから落下する円柱を,3本指を用いてキャッチングする.このとき, ある傾きを持って落下する円柱を,3本指をうまく用いて回転させることにより, 把握しやすい姿勢まで操作する.対象の3次元位置に加えて姿勢の情報もフィード バックすることにより,このタスクを実現した.
動画
参考文献
- 今井睦朗, 並木明夫, 橋本浩一, 石川正俊, 金子真, 亀田博, 小山順二:高速多指ハンドと高速視覚を用いた ダイナミックキャッチング, 第9回ロボティクス・シンポジア (沖縄, 2004. 3. 9)/予稿集, pp.517-522
- Akio Namiki, Yoshiro Imai, Masatoshi Ishikawa, and Makoto Kaneko : Development of a High-speed Multifingered Hand System and Its Application to Catching, 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (Las Vegas, 2003.10.30)/pp.2666-2671 [PDF format ]
- Akio Namiki, Yoshiro Imai, Masatoshi Ishikawa, Makoto Kaneko, Hiroshi Kameda, and Junji Koyama : Dynamic Catching Using a Ultra-High-Speed Multifingered Hand System, 2003 IEEE International Conference on Robotics and Automation (Taipei, 2003.9.17)/Video Proceedings, Abstracts References, pp.28-29