


Lightweight High-Speed Multifingered Hand System
Summary
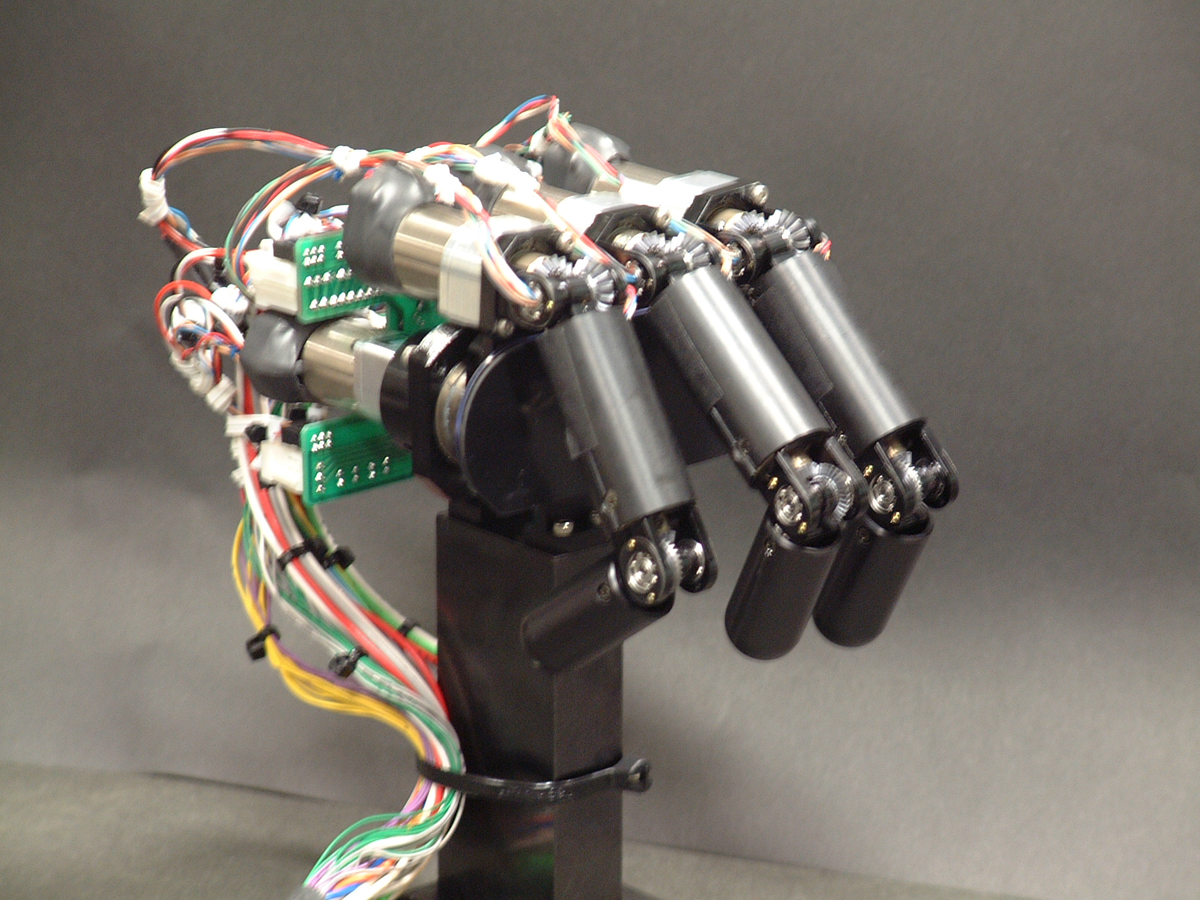
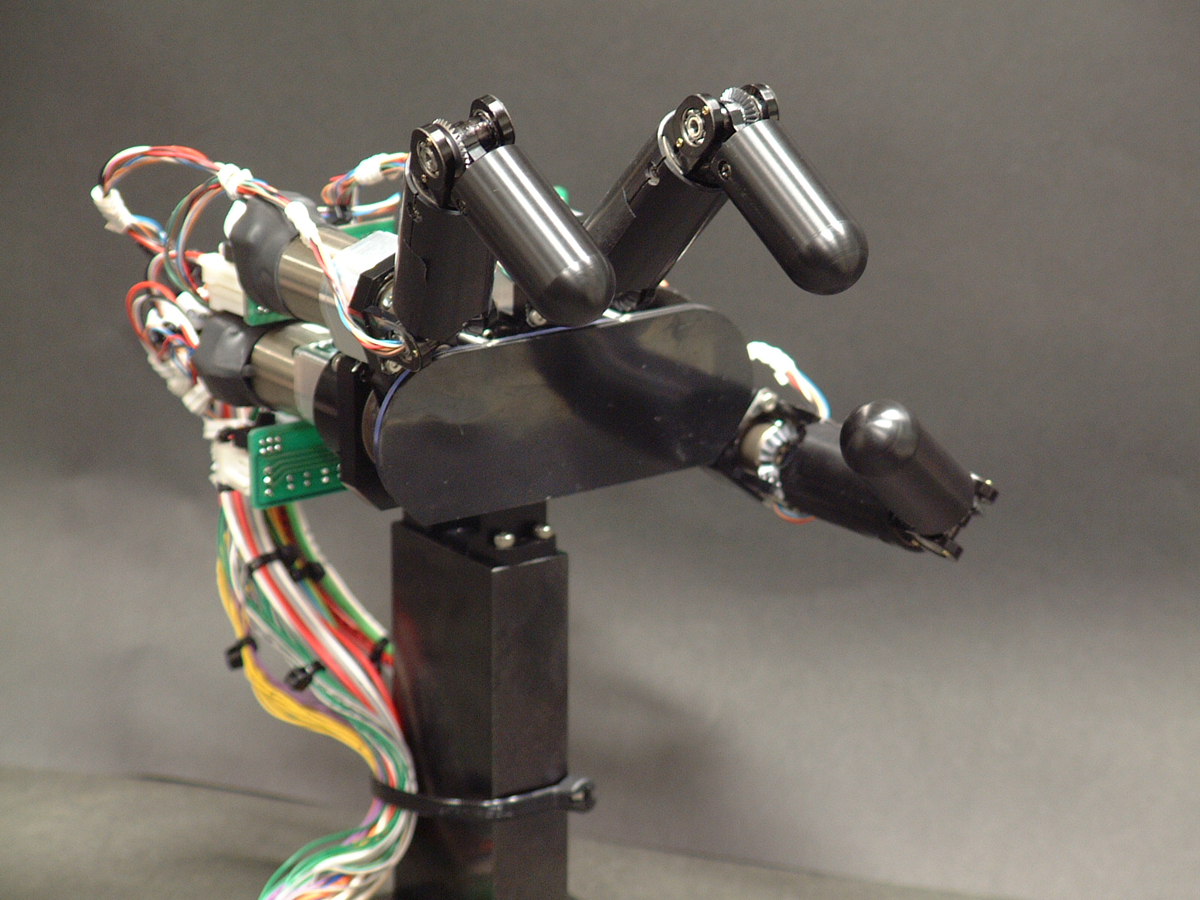
Dynamic grasping using a newly developed high-speed hand system and high-speed vision is proposed. In the high-speed hand system, a newly designed actuator provides the finger with excellent features: It is lightweight (about 110g per finger),and it is moved with speed reaching about 4m/s and 4N power at a finger tip, and backlash is small enough for high-gain feedback control. As a result high-speed motion at 180deg/0.1s is realized. With high-speed visual feedback at a rate of 1KHz, the hand can grasp and handle dynamically moving object. Experimental results are shown in which a falling object is caught by high-speed hand.( Dynamic Catching Page )



Movies
Related Researches
- High-speed Pen Spinning
- High-speed Regrasping
- High-speed Dribbling
- Egg Catching
- High-speed Catching System
References
- Akio Namiki, Yoshiro Imai, Masatoshi Ishikawa, and Makoto Kaneko : Development of a High-speed Multifingered Hand System and Its Application to Catching, 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (Las Vegas, 2003.10.30) pp.2666-2671 [ PDF format ]
- A. Namiki, Y. Imai, M. Ishikawa, M. Kaneko, H. Kameda, and J. Koyama : Dynamic Catching Using a Ultra-High-Speed Multifingered Hand System, 2003 IEEE International Conference on Robotics and Automation (Taipei, Taiwan, 2003.9.17) Video Proceedings, Abstracts & References, pp.28-29