


高速多指ハンドと柔軟指先を用いたソフトキャッチング
概要
ロボットハンドの運動能力を人間以上に高速化することを目指して 高速ハンド が開発されている. このロボットハンドを1[kHz]の視覚フィードバックで制御することで捕球実験が行われており, 現在までに球や円柱などの捕球に成功している.
しかし,これらの実験で用いたロボットハンドは, プラスチック成型した指先に滑り止めのゴム被覆をつけた,固いハンドであった. そのため,高速な繰りを行う場合には,対象に過大な力を加えてしまう危険があり, 今までの捕球実験では捕球対象として柔らかいものしか用いることができなかった.
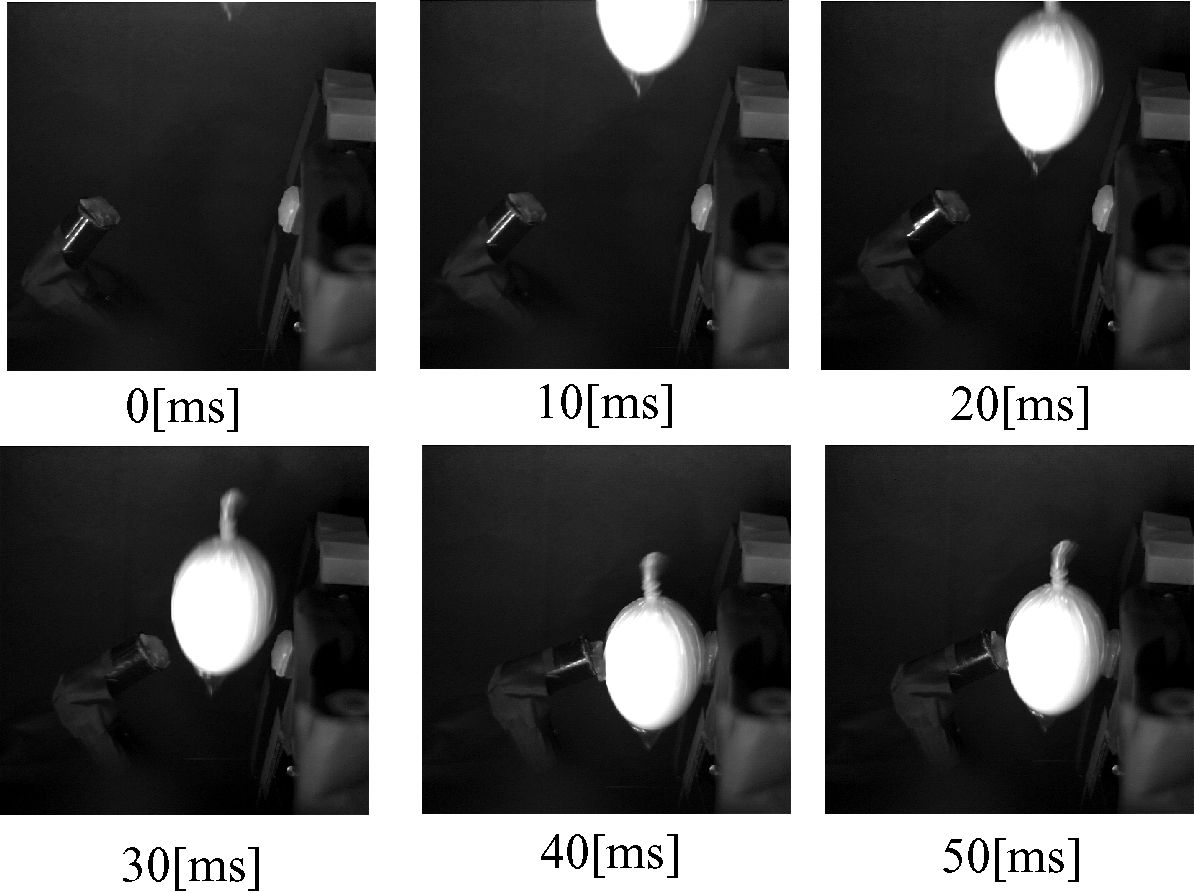
そこで本研究では,この問題を解決するために, 指先にゲルを用いた柔軟被覆をつけた高速指モジュール制御システムを開発した. ゲルの持つ衝撃吸収能力と, 高速視覚フィードバックによる仮想インピーダンス制御を統合することで, 壊れやすい物体を高速に捕球することを目指す.今回の実験では, このことを実証するために壊れやすい物の代表として「生卵」を選択し, これを割らずに把握する実験を行った.
動画
×1.0倍速
×0.002倍速
参考文献
- 鵜飼賀生, 並木明夫, 石川正俊:高速視覚と柔軟指先を用いたソフトキャッチング, 第5回計測自動制御学会システムインテグレーション部門講演会 (筑波, 2004.12.19)/講演論文集, pp.1146-1147
- 大西政彦, 並木明夫, 橋本浩一, 石川正俊:柔軟な指先を持つ高速ハンドによる捕球動作の実現, 日本機械学会ロボティクス・メカトロニクス講演会'04 (名古屋, 2004)/講演論文集