


ホーム >
センサ フュージョン > 高速多指ハンドを用いた動的保持動作
高速多指ハンドを用いた動的保持動作
概要
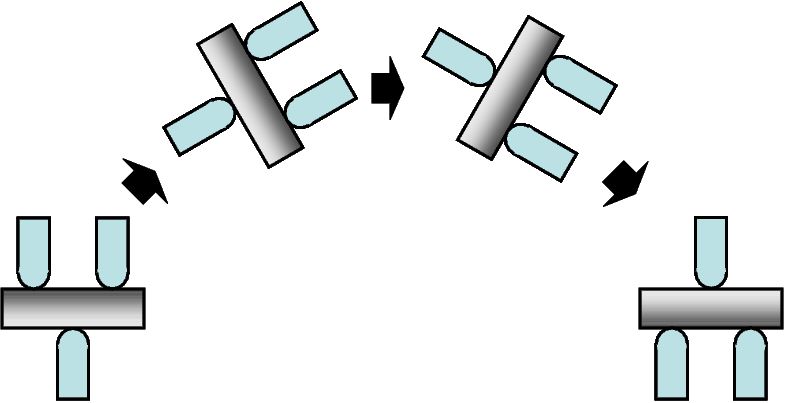
ロボットハンドによる器用な操りの実現を目指して, さまざまな把握や操りのアルゴリズムが考えられてきたが, これらの多くはロボットの指先を対象物に接触させて, 静的な安定条件を実現させることを目的としていた.一方, 人間による操り動作にはこのような静的な操りだけではなく, 指と対象物の接触状態が動的に変化するような操りも存在する. 人間の操りがロボットに比べて器用で柔軟なのはこのためである. このような器用な動きを実現するために,我々は「動的保持」と呼ばれる動作を提案している. 動的保持動作とは,静的には安定状態にない物体を定常な周期運動状態に保つ動作のことである.
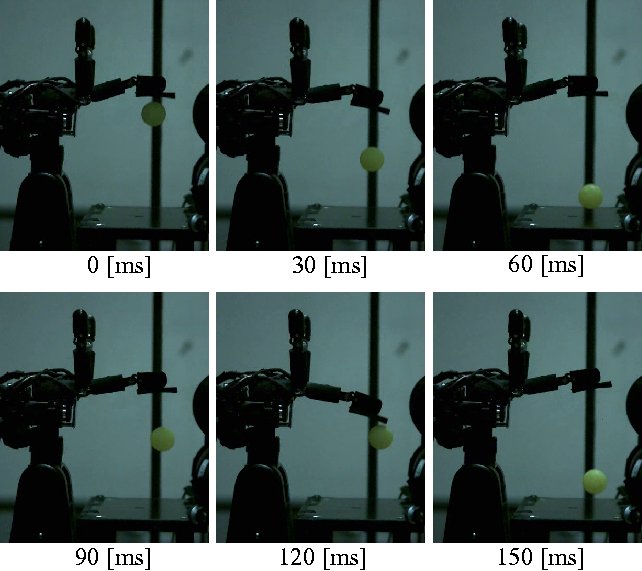
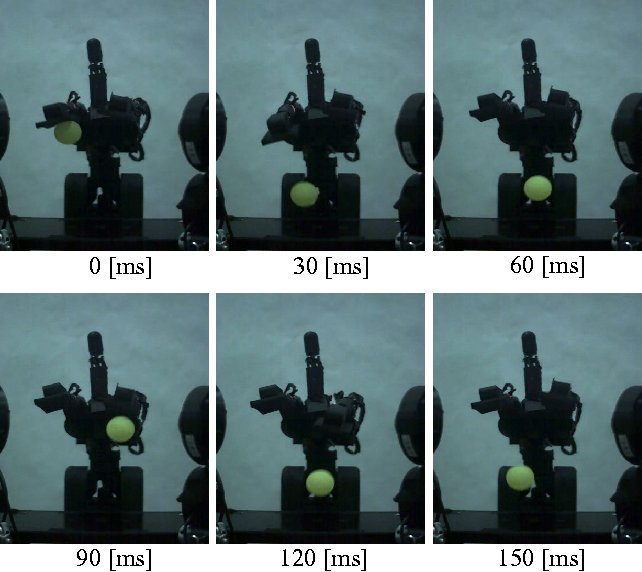
本研究では,高速で器用な動的操りを目的とした動的保持動作の一例として, 高速多指ハンドによる毎秒10 回のドリブル動作実験を行っている.
 静的保持 |
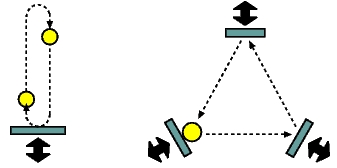 動的保持 |
|---|
|
|
| 一本指ドリブル | 二本指ドリブル |
動画
参考文献
- 塩形大輔,並木明夫,石川正俊:高速多指ハンドと視覚フィードバックによる高速ドリブル動作の研究, 第11回ロボティクスシンポジア (嬉野,2006.3.17)/講演論文集, pp.482-487, 2006
- Daisuke Shiokata, Akio Namiki and Masatoshi Ishikawa : Robot Dribbling Using a High-Speed Multifingered Hand and a High-Speed Vision System, 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (Edmonton, 2005.8.5)/Proceedings, pp.3945-3950
- 塩形大輔, 並木明夫, 石川正俊:高速ロボットハンドによるドリブル動作の実現, 第5回計測自動制御 学会システムインテグレーション部門講演会 (つくば, 2004.12.19)/講演論文集, pp.1148-1149
- 塩形大輔, 並木明夫, 石川正俊:高速ロボットハンドによる物体の動的保持, 第22回日本ロボット学会 学術講演会 (岐阜, 2004.9.17)/講演論文集, 3J13