
ホーム > マイクロビジュアルフィードバック
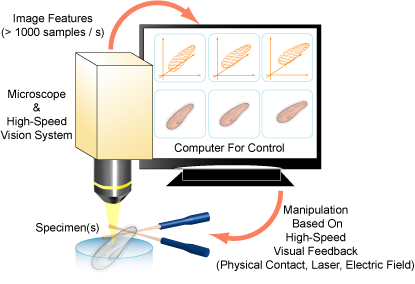
マイクロビジュアルフィードバック
研究目的
微小な機械系であるマイクロマシンやバイオテクノロジーの発展に伴い, 大きさがマイクロメートル程度の微小な対象の操作・制御が重要になっ てきている. しかし, これまでのところこのような微小対象の自律的な 操作・制御は実現されておらず, 現状では人間が顕微鏡を覗きながら細 胞などの微小対象を操作しているため, その自動化・効率化が求められ ている. この問題を解決するために, 高速なビジュアルフィードバック と顕微鏡を組み合わせて微小な対象の情報をフィードバックするマイク ロビジュアルフィードバック(MVF)を提案し, 微小対象の自律的・効率 的な制御の実現を目指している.