
ホーム > マイクロビジュアルフィードバック > 高速トラッキングによる微生物の運動制御
高速トラッキングによる微生物の運動制御
微生物はその進化の過程で,既存のマイクロマシンを凌駕する高性能なセンサとアクチェータを体内に獲得してきた.我々の目的は,微生物を高機能マイクロマシンとみなして制御する「オーガナイズドバイオモジュール (OBM)」システムの構築である.本論文ではその最初のステップとして,視覚フィードバックによる微生物の制御システムを構築した.
多くの微生物には電気刺激に対して定位しながら移動する「電気走性」という性質があり,微生物の制御手法として有用と考えられる.電気走性には個体差があるため,高度なアクチュエーションには,運動する微生物を一個体レベルで観察,評価する必要がある.しかし従来の観察方法では,高倍率で観察するとすぐに微生物を見失ってしまい,低倍率での観察を余儀なくされていたうえに,作業領域が視野内に限られていた.そこでトラッキング技術を応用して,作業領域の制限なしに微生物一個体を高倍率で評価できるようにした.また,トラッキングを 1kHz という高速で行うことにより,従来のトラッキングの問題点である magnification と trackability のトレードオフを解消するとともに,従来のビデオレート視覚フィードバックではなしえなかった,リアルタイムでの微生物制御を可能にしている.
システム概要
システム概要は以下のとおりである.プレパラート上のチャンバー内を運動する微生物の位置が,イメージインテンシファイア付高速ビジョンである I-CPV によって 1kHz という高フレームレートで計測され,軌跡や姿勢などの情報がリアルタイムで計算される.チャンバーは XY ステージ上に固定されているので,ステージ位置を視覚情報によってフィードバック制御することで,個体を常に視野中心に据えてトラッキングできる.また微生物に電気刺激を与えるための電極がチャンバーに設置され,微生物のリアルタイムアクチュエーションを実現する.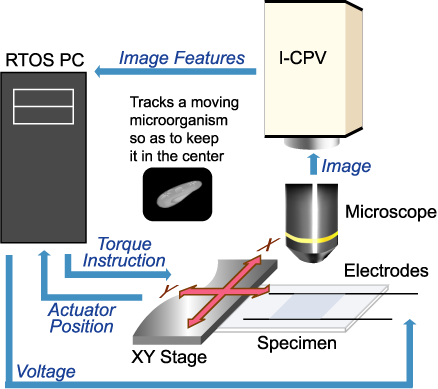
実験結果
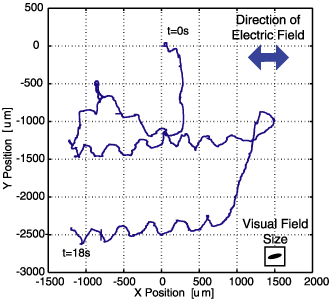
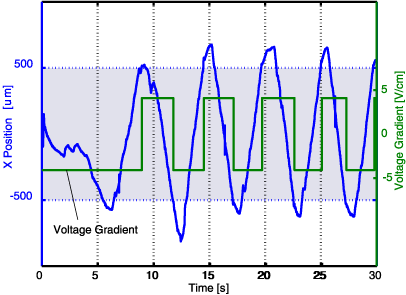
実験では原生生物の一種であるゾウリムシ (フィードフォワード制御実験
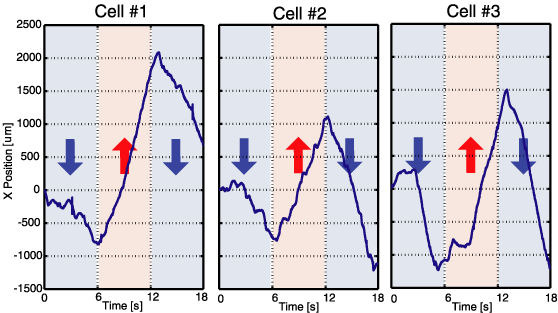
フィードフォワード制御実験 (電場を 6 秒ごとに反転させる) の結果を以下 に示す.制御入力に追従してゾウリムシの往復運動が実現されている. 動画 (MPEG,3MB)
動画 (MPEG,3MB)
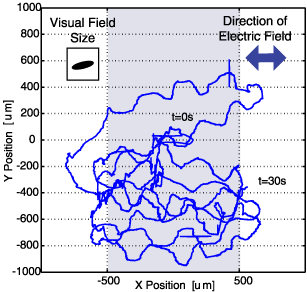
フィードバック制御実験
フィードバック制御実験 (狭い領域内に細胞をトラップする) の結果を以下に示す.ブルーの網掛け領域がトラッピング領域である.トラッピング領域内へのゾウリムシ閉じ込めに成功している. 動画 (MPEG,5MB)
動画 (MPEG,5MB)
参考文献
- Naoko Ogawa, Hiromasa Oku, Koichi Hashimoto and Masatoshi Ishikawa. Microrobotic Visual Control of Motile Cells using High-Speed Tracking System. IEEE Transactions of Robotics, Vol. 21, No. 4, Aug. 2005. [PDF (1.1M)] *IEEE
- 尾川 順子,奥 寛雅,橋本 浩一,石川 正俊.高速トラッキングを用 いたゾウリムシの運動制御.第 5 回計測自動制御学会制御部門大会 (宮城県 仙台市,2005.5.27) / 資料,pp. 687-690,May 2005.
- Naoko Ogawa, Hiromasa Oku, Koichi Hashimoto and Masatoshi Ishikawa. Motile Cell Galvanotaxis Control using High-Speed Tracking System. 2004 IEEE International Conference on Robotics and Automation (ICRA 2004) (New Orleans, USA, 2004.4.28) / Proceedings, pp. 1646-1651, Apr, 2004. [PDF (1.7M)] *IEEE