
ホーム > マイクロビジュアルフィードバック > マイクロビジュアルフィードバック(MVF)システム
 印刷用
印刷用マイクロビジュアルフィードバック(MVF)システム
研究目的
顕微鏡下で代表されるマイクロ世界における作業のほとんどは, 環境に合わせた作業を行うためのスキルを人間が習得する必要があった。この状況を打開し, 人間に過度な負担をかけることなくマイクロ世界での自律的な操作を目指して, マイクロ世界において高速なビジュアルフィードバックを実現可能とする手法であるマイクロビジュアルフィードバック(MVF)を提案し, MVFシステムを試作してきた。 MVFは高速視覚によって, 微小な対象の情報を高速・高精度・非接触に計測・フィードバックすることで微小対象の自律的な制御を行う手法である。試作したMVFシステム


システムの現段階での構成は, マイクロ世界の運動対象を視野内に捕捉するための仕様をとっており, その構成は, 列並列ビジョンシステム(CPV), 顕微鏡,直動コイルアクチュエータによる二軸のXYステージ, それらを制御するDSPシステムからなる. 対象の画像は顕微鏡を通して拡大され,高速視覚システム,CPVシステムに入力される。高速視覚システムは,画像の入力・処理を行い,画像特徴量を抽出して外部に出力する。この画像の入力から出力までを,1フレームあたり1.28[ms]で行う。画像処理結果は制御用DSPシステムに送られ, その情報をもとに制御用DSPはアクチュエータに対して制御指令を与える。現在のシステムではこれらの全体の制御ループを約1kHzでの動作で実現されている。
研究結果
- 現在のシステムでの結果
- 旧システムでの結果
運動する微生物の顕微鏡視野内トラッキング
運動する微生物を顕微鏡で観測しようとする場合, 対象がすぐに顕微鏡視野から外れてしまい, 継続的な観測が難しいという問題点がある。そこで, 運動する微生物を顕微鏡視野内にトラッキングする実験を行った。本実験では運動する微生物としてゾウリムシを対象とした。
トラッキングしている様子の連続写真と, その時のゾウリムシの軌跡を示す。ゾウリムシの軌跡は, XYステージの位置と画像中の対象位置を合わせて算出した結果を図示している。
これらの結果から, ゾウリムシのような運動する微生物を顕微鏡視野内に補足しつづけることができることがわかる。
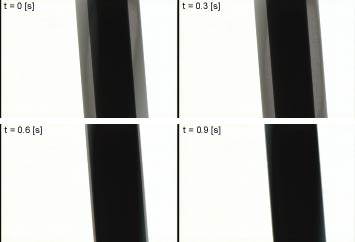
微小な片持ち梁の振動制御
外乱を受けて振動する片持ち梁を,ビジュアルフィードバックで制御することで,その振動が止まるように制御した。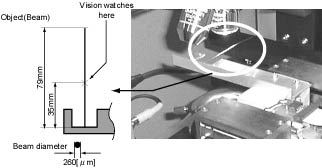
実験のビデオ(mpeg1) [高画質(11.9MB)] [低画質(1.2MB)]
対象は図に示すような細い針金(一次固有振動数 約21[Hz])を用いた。結果の連続写真から, 振動を制御して, 止めていることがわかる。
自律的直線検出実験

実験のビデオ(mpeg1) [高画質(8.7MB)] [低画質(1.3MB)]
隣接する直線を高速視覚からの情報のみから自律的に検出・補足する実験。この実験では一つの直線を200msトラッキングすると, 隣接する直線を探しにいき, 検出するとその直線をまた200msトラッキングするという動作を繰り返す。本実験から本システムは自律的にマイクロ世界対象を操作できることがわかった。
参考文献
- 奥 寛雅、石井 抱、石川 正俊: 高速ビジュアルフィードバックによる微生物のトラッキング, 日本機械学会ロボティクス・メカトロニクス講演会'01(高松,2001.6.10)/講演論文集,2P2-C4
- 奥 寛雅、石井 抱、石川 正俊:マイクロビジュアルフィードバックシステム, 電子情報通信学会誌 D-II, vol. J84-D-II, no. 6, pp. 994-1002, 2001年6月.
- 奥 寛雅:MVF(マイクロビジュアルフィードバック)の目ざすもの, エレクトロニクス, vol.46, No.3, pp. 28-29, 2001.
- Hiromasa OKU, Idaku ISHII, and Masatoshi ISHIKAWA: Tracking a Protozoon Using High-Speed Visual Feedback, Proc. of 1st Annual Int. IEEE-EMBS Special Topic Conf. on Microtechnologies in Medicine & Biology(Lyon, France, Oct. 12-14, 2000).
- 奥 寛雅、石井 抱、石川 正俊: 高速視覚によるマイクロシステムの実時間ダイナミクス推定, 日本機械学会ロボティクス・メカトロニクス講演会'00(熊本,2000.5.12)/講演論文集,2P1-62-102
- 奥 寛雅, Andy Chen, 石井 抱, 石川 正俊: 高速ビジュアルフィードバックによるマイクロアクチュエーション, 第17回日本ロボット学会学術講演会予稿集 pp.637-638, 1999
- 野嶋 琢也, 石井 抱, 石川 正俊: 高速視覚を用いたマイクロビジュアルフィードバックシステム, 第16回日本ロボット学会学術講演会予稿集, 1998