


ホーム >
システム ビジョン デザイン > 列並列ビジョン (CPV) による高速ターゲットトラッキングシステム
列並列ビジョン (CPV) による高速ターゲットトラッキングシステム
本研究の成果が浜松ホトニクス(株)により製品化されました→ インテリジェントビジョンシステム
概要
ビジュアルフィードバックによってロボットの高速かつ動的な制御を実現したいという要求が高まっている.このためにはビジョンシステムが,高速な動きに追従し,高速な処理と特徴量のフィードバックを実現しなければならない.
これに対して,ロボットの制御に必要なサーボレートは一般に1kHz程度であり,動的な制御を実現する上で,これまでのビジョンシステムはこの要求を満たすものではなかった.
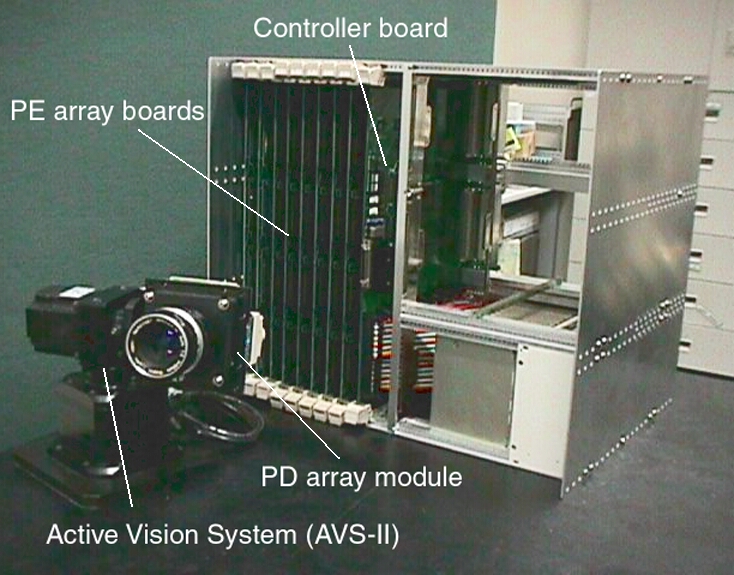
このような背景のもと,我々は,列並列画像伝送と完全並列処理を組み合わせることで,1msの高速性と128×128画素の高解像度を実現した.センサチップは128×128画素のフォトディテクタと128個の8bitのAD変換器からなり,列ごとに並列に,ビットシリアルにデータを出力する.これに対して並列処理部は多数のFPGAを用いて実装され,128×128個のプロセッシングエレメント(PE)により,画素ごとに完全並列な処理が行われる.
(本研究は
浜松ホトニクス(株)との共同研究です)
|

|

|
| CPV-I | CPV-II | CPV-II + アクティブビジョン |
動画
参考文献
- 向坂直久, 豊田晴義, 水野誠一郎, 中坊嘉宏, 石川正俊:超高速インテリジェントビジョンシステム:CPV-IIを用いたステレオ視, 計測自動制御学会システムインテグレーション部門講演会 (神戸, 2002.12.21)/講演論文集, Vol.3, pp.55-56
- Yoshihiro Nakabo, Idaku Ishii, and Masatoshi Ishikawa : 3D Tracking Using Two High-Speed Vision Systems, IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS 2002) (Lausanne, 2002.10.4)/Proceedings, pp360-365
- 豊田晴義, 向坂直久, 水野誠一郎, 中坊嘉宏, 石川正俊:開発すすむ列並列ビジョンシステム,エレクトロニクス, Vol.46, No.3, pp.18-21 (2001)
- Yoshihiro Nakabo, Masatoshi Ishikawa, Haruyoshi Toyoda and Seiichiro Mizuno : 1ms Column Parallel Vision System and Its Application of High Speed Target Tracking, IEEE Int. Conf. Robotics and Automation (San Francisco, 2000.4.26)/Proceedings, pp.650-655
- 中坊嘉宏, 石川正俊, 豊田晴義, 水野誠一郎: ビジュアルフィードバックのための1ms列並列ビジョン(CPV)システム, 第5回ロボティクスシンポジア論文集 (神戸, 2000.3.27)/予稿集, 22C2, pp.375-380