


Home >
Sensor Fusion >
Dynamic Active Catching Using High-speed Multifingered Hand
Dynamic Active Catching Using High-speed Multifingered Hand
Summary
We have achieved dynamic catching tasks as examples of dynamic manipulation. In this regard, we propose an "active" strategy for catching. The catching strategy in our previous study may be called "passive" in that impact forces between the target and the fingertip are kept as low as possible. However, in order to be effective in various situations, it is important to utilizing the high-speed motion of the hand and impact forces actively. This is because the hand may catch the target in the optimal position by changing the position and the orientation of the target. We use a falling ball and a falling cylinder as catching targets.
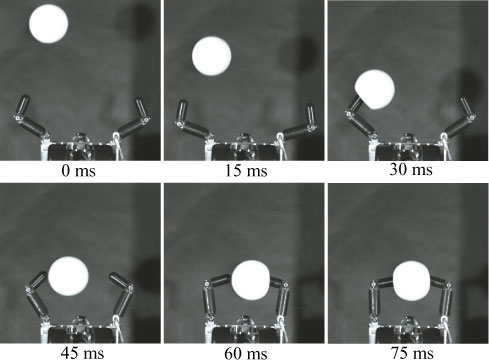
Active catching of a falling ball
The ball does not fall at the center of the two fingers but falls in a position shifted from center in the experiments. To achieve robust catching, the two fingers are controlled so that the target should bounce into the middle of two fingers.
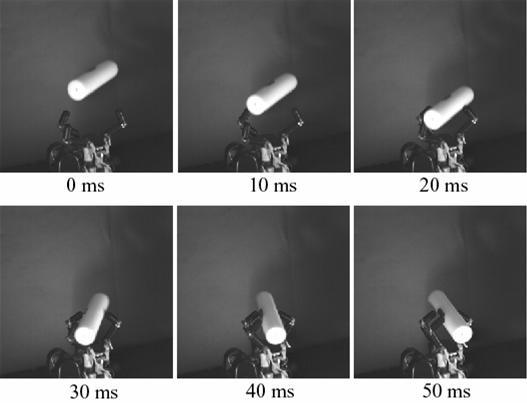
Active catching of a falling cylinder
The cylinder with postual change falls at the center of the three fingers in the experiments. To achieve stable catching, the fingers instantaneously rotate the cylinder to be grasping configuration in the horizontal plane.
Movies
References
- Akio Namiki, Yoshiro Imai, Masatoshi Ishikawa, and Makoto Kaneko : Development of a High-speed Multifingered Hand System and Its Application to Catching, 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (Las Vegas, 2003.10.30) pp.2666-2671 [ PDF format ]
- Akio Namiki, Yoshiro Imai, Masatoshi Ishikawa, Makoto Kaneko, Hiroshi Kameda, and Junji Koyama : Dynamic Catching Using a Ultra-High-Speed Multifingered Hand System, 2003 IEEE International Conference on Robotics and Automation (Taipei, Taiwan, 2003.9.17) Video Proceedings, Abstracts & References, pp.28-29