


ホーム >
センサ フュージョン >動的補償に基づく人間機械協調:マイクロからマクロまで
動的補償に基づく人間機械協調:マイクロからマクロまで
概要
人間の認知能力と機械(ロボット)の高精度な動作能力を最適に組み合わせることを目指して、 動的補償(Dynamic Compensation) に基づく人間機械協調に関する研究を紹介する。
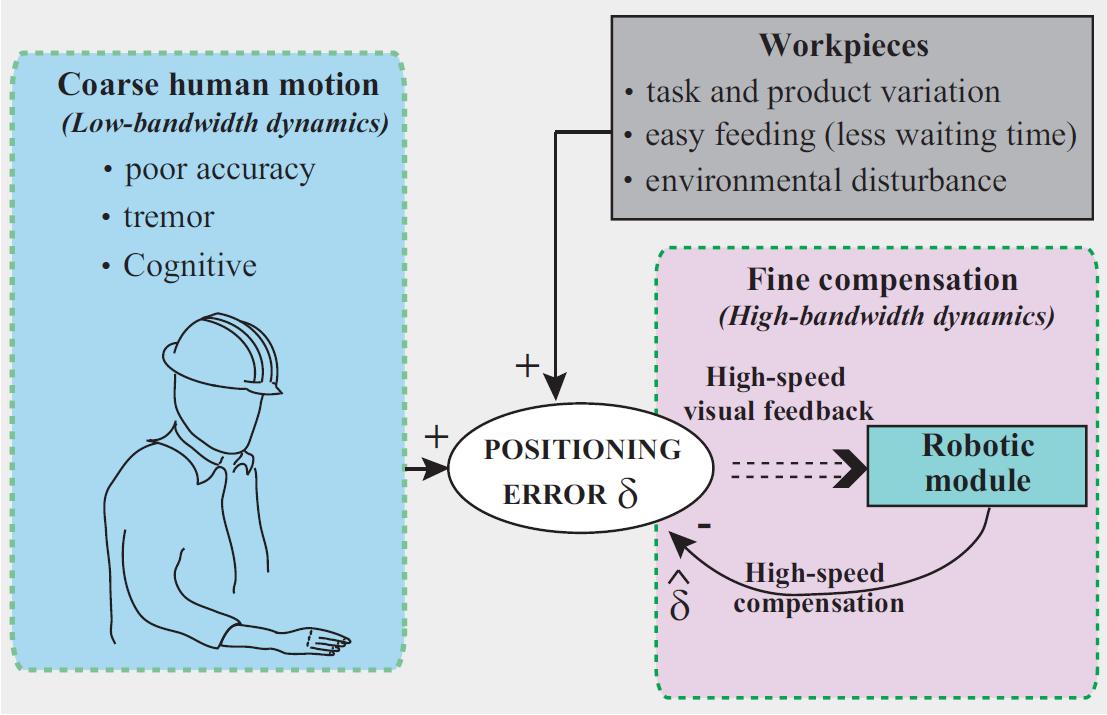
提案した人間機械協調では,人間のオペレータがアシスタントロボットを動かして,目標軌道をロボットの操作範囲内に維持しながら粗い精度でグローバルモーションを実現する.それと同時に,高速ビジュアルフィードバックに基づいた高速動作可能なアシスタントロボットは能動的にローカル誤差を利用して高精度で補償し,人間の作業精度と性能を上げることを実現する.動的補償とは,ロボットモジュールが人間よりもはるかに高い動的帯域幅を有するという概念である.それにより,人間の認知能力とロボットの高精度な動作能力を最適に組み合わせることが実現する.アプリケーションのシナリオとして,マイクロ操作からからマクロ操作まで様々な応用にも活用できると考えられる.
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.