


ホーム >
センサ フュージョン > 人間のマイクロ操作のためのロボットシステム
人間のマイクロ操作のためのロボットシステム
概要
微小物体(マイクロメートルオーダ)の操作において,対象が微小であるため人間の目には見えず, カメラを用いて微小部の拡大図を提示することにより,人間が扱える可能性を高くする. しかし,このようなフィードバックが無い場合,精密な操作は極めて困難である. また,拡大図が提示できたとしても,人間の操作精度には限界があるため, 要求される精度(例えば,マイクロメートルオーダ)によって, タスク実現が困難な場合も多く,多大な時間を要する.
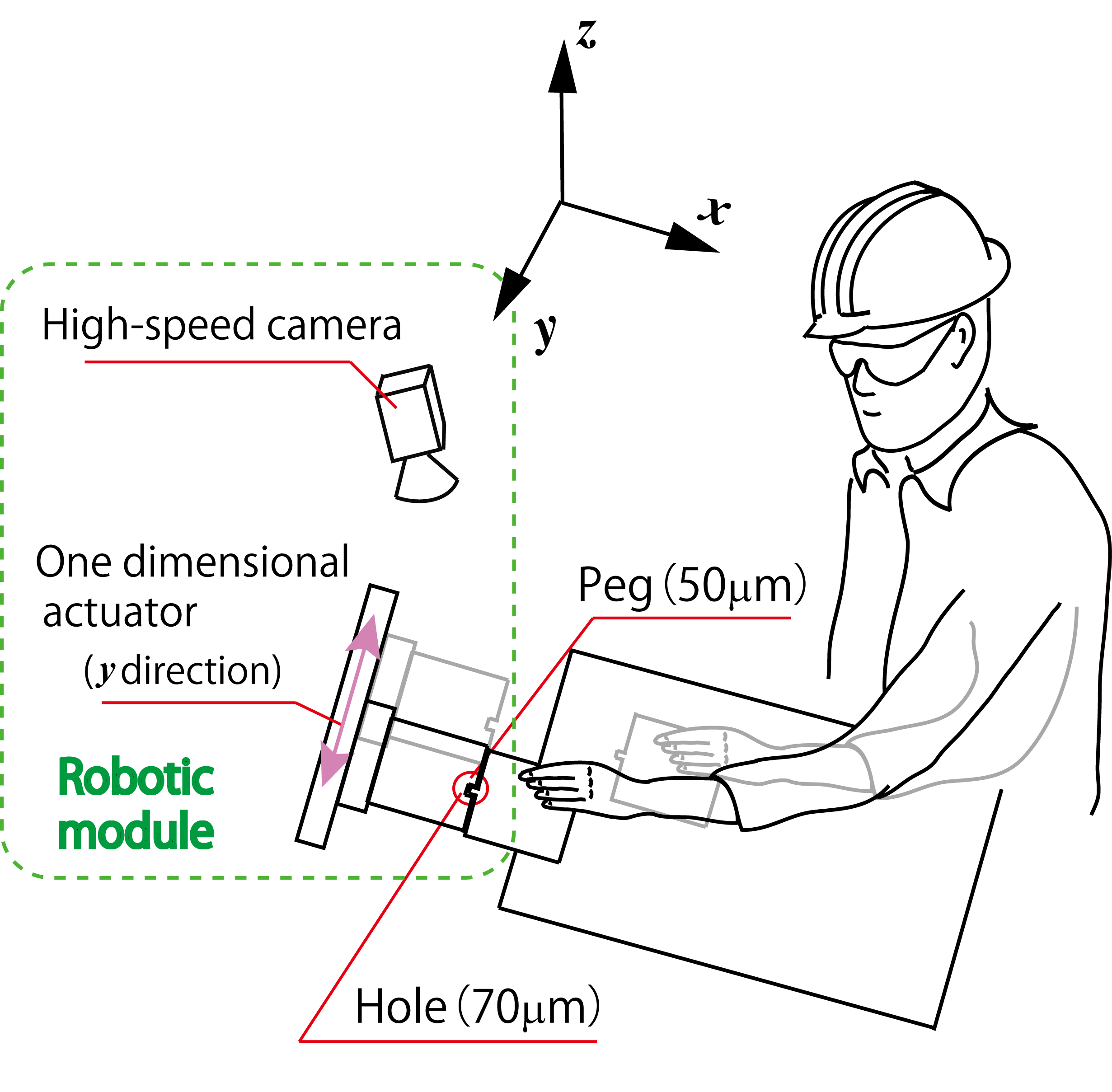
そこで本研究では,高速ビジョンと高速アクチュエータから構成されるロボットモジュールを用いて, 対象の位置誤差を補償する機能を追加することにより,マイクロメートルオーダの微小物体の操作を可能にする. 特に,画像内の相対座標系において高速高精度で位置制御技術(Dynamic Compensation)を導入することにより, 人間の粗い動作を補償しながら,マイクロメートルオーダの繊細な作業を実現する.
具体的なタスクとしては,70マイクロメートルの凹部に50マイクロメートルの凸部を挿入する超精密操作を実現している. 凹部のあるアルミ材は高速アクチュエータに固定し,凸部のあるアルミ材は人間がが把持し,挿入操作を行う. このとき,高速ビジョンでアルミ材を観察することにより凹凸部を検出すると同時に, 凹凸部の位置誤差を計測し,その誤差が無くなるように高速アクチュエータが凹部の位置を制御する.
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.