


ホーム >
センサ フュージョン >新しいビジョンチップを利用した動的補償ロボットシステム
新しいビジョンチップを利用した動的補償ロボットシステム
概要
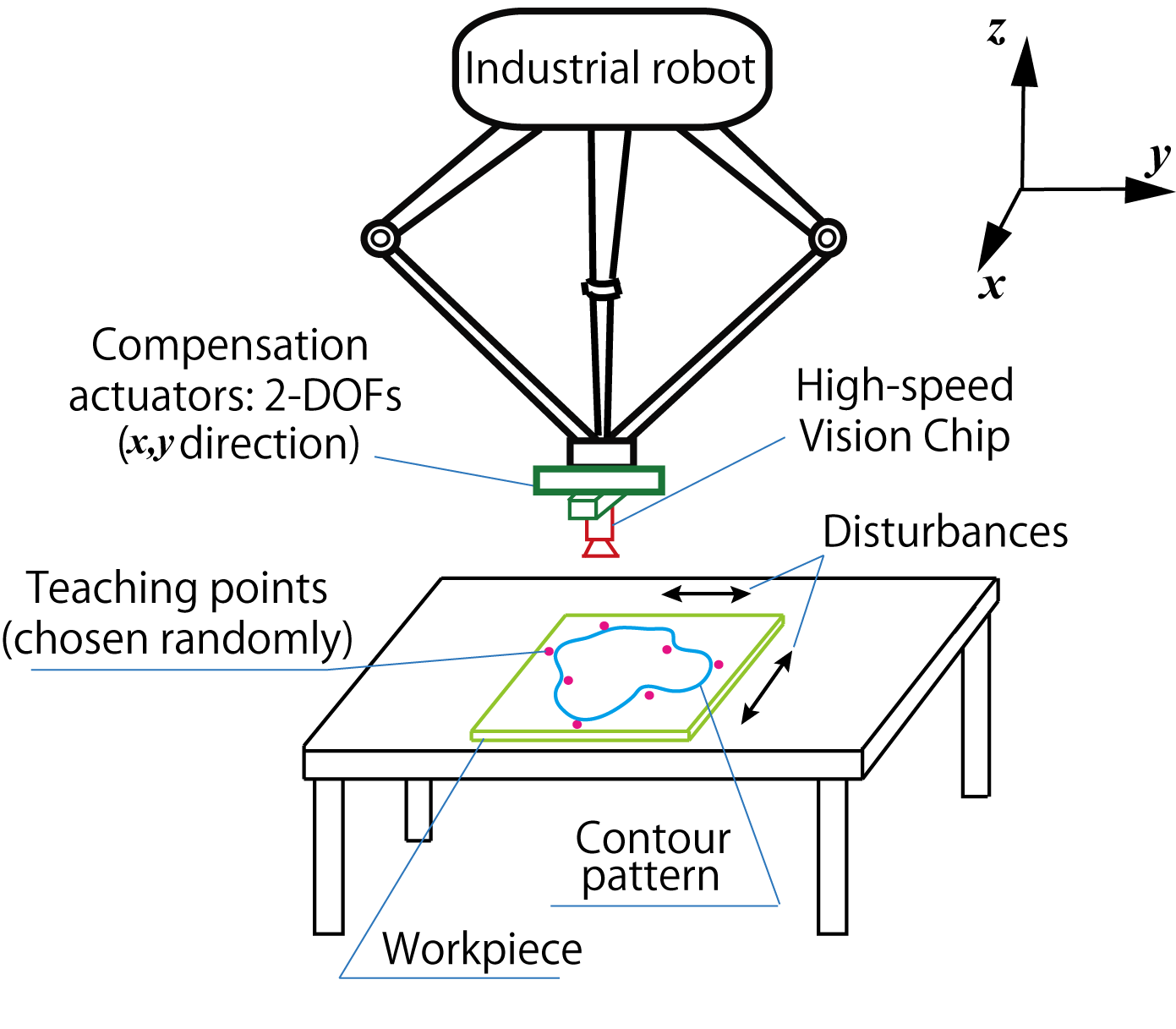
本研究では,二軸補償機構とソニーと東京大学石川渡辺研究室が共同で開発した 高速ビジョンチップにより,産業用ロボットに対して簡単な教示で,任意の二次元軌道に対する軌道トラッキングを高速高精度で行う.本手法は,coarse-to-fine戦略とした動的補償(Dynamic Compensation)に基づき,産業用ロボットの高速動作時におけるダイナミクスの不確定性および工具の微細変動など外部からの不確定要素に対するロバスト性を向上させることができる.提案する戦略の方針として,高速高精度軌道トラッキングタスクを以下二つのサブタスクに分け,並列で実行させる.
1) 一台の汎用の産業用ロボットが広範囲で大まかな位置決めを行う.具体的には,補償機構により目標軌道をカバーできる程度のキーポイントをラフに教示し,産業用ロボットの軌道生成を行う.
2) 高速ビジョンチップから得られる画像特徴量に基づくローカルな高速ビジュアルフィードバックにより,目標軌道が常に画像中心となるように産業用ロボットに搭載した二軸補償機構を制御する.すなわち,産業用ロボット自身の不確定性および外部環境から生じる外乱の不確定要素に対して補償を行う.
ソニーと東京大学石川渡辺研究室が共同で開発した 高速ビジョンチップでは,画像処理をチップ上で実現できるため,従来の画像処理装置は不要となり,かつ高速ビジュアルフィードバック(1,000Hz)が可能である.
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.