


ホーム >
センサ フュージョン >
動的補償に基づく全自動化高速高精度軌道トラッキング
動的補償に基づく全自動化高速高精度軌道トラッキング
概要
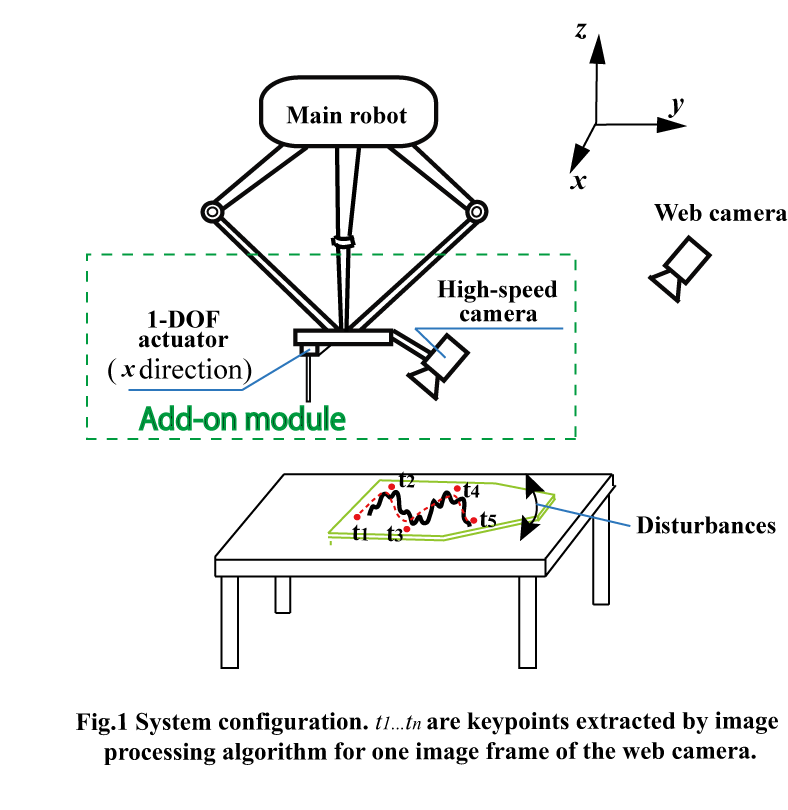
本研究では,従来の産業用ロボットにおける教示・再生を頼らず高速度と高精度の位置決め手法を提案した.本手法は,coarse-to-fine戦略とした動的補償(Dynamic Compensation)に基づき,産業用ロボットの高速動作時でのダイナミクスによる不確定性及び工具の微細変動など外部からの不確定要素に対するロバスト性は高いと考えられる. 提案する戦略の方針として,高速高精度軌道トラッキングタスクを以下二つのサブタスクに分け,並列で実行させる.
1) 一台の汎用の産業用ロボットが大範囲で大まかな位置決めを行う.具体的には,外付けの安価のカメラ(産業用ロボットとの相対位置に対する粗いキャリブレーションが必要)により,対象軌道がカバーできるくらいのキーポイントを画像処理で抽出し,座標変換してから,産業用ロボットの移動軌道を定める.
2) 高速高精度のロボットモジュール(高速アクチュエータおよび高速ビジョン)を産業用ロボットに搭載するし,ローカルな高速ビジュアルフィードバックにより,産業用ロボット自身の不確定性及び外部環境から工具に持たされた不確定要素に対する補償を行う.
この技術を実現することにより,標準化したロボットモジュールを任意のロボットに搭載することで,既存のロボットを活用しつつ,作業速度と精度を大幅に向上させることが期待される.
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.