高速キャッチングシステム(日本科学未来館常設展示)
概要
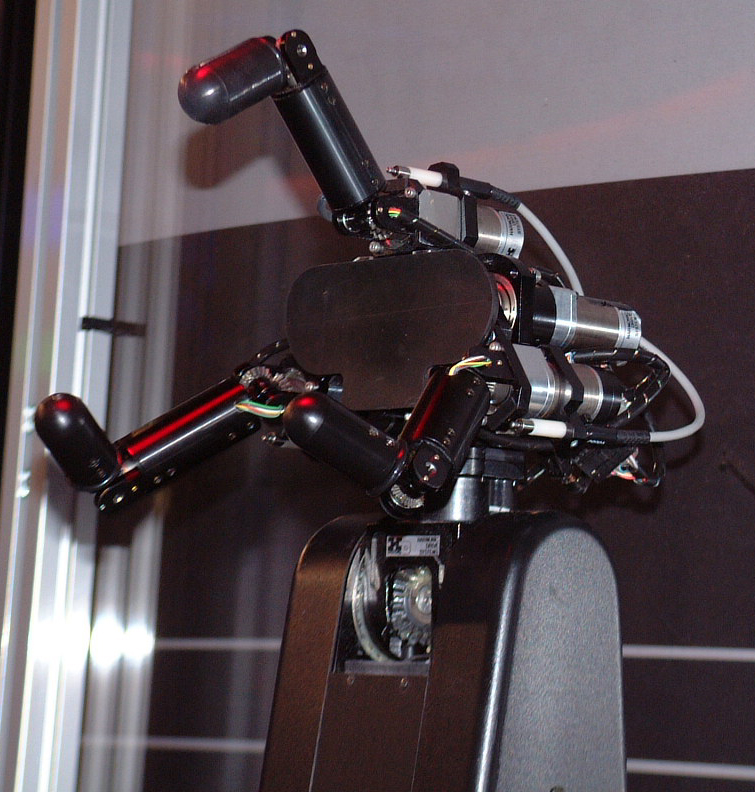
投げ込まれたボールの軌道をビジョンによって瞬時に判断してキャッチすることができる, 超高速ロボットハンドシステムを開発した.このシステムは, 1ms(0.001秒)で画像処理が可能な ビジョンチップ,人間を超える高速運動が可能な 高速ロボットハンド, 画像情報に基づいてロボットを制御する視覚フィードバック制御の3つがキーとなる技術であり, わずか0.1秒で到達するボールを,人間の眼には見えない速度で瞬時にキャッチすることができる.
本システムは, 独立行政法人科学技術振興機構の戦略的創造研究推進事業の研究テーマ 「感覚運動統合理論に基づく「手と脳」の工学的実現」(研究代表者:石川正俊, 東京大学大学院情報理工学系研究科教授)で開発された技術に基づいており, 2005年7月より, 日本科学未来館 (東京都江東区)において展示されている.
本システムは, セイコープレシジョン(旧)(高速キャッチングシステム開発, 視覚フィードバック制御担当), ハーモニック・ドライブ・システムズ (高速ロボットハンド開発担当)の協力を得て製作されました.