


ホーム >
センサ フュージョン
> 動的補償に基づく全自動ビーズアート組立て
動的補償に基づく全自動ビーズアート組立て
概要
近年スマートマニュファクチャリングやインダストリー4.0が注目されている様に,従来の多量少品種生産から,少量多品種・短サイクルの生産への移行という生産の変化や,パンデミックによるサプライチェーンへの大きな被害により,作業者への依存度を減らす生産の自動化や次世代の製造システムが望まれており,これに対して,我々は産業用ロボットの知能化に向けて動的補償を提案してきた.
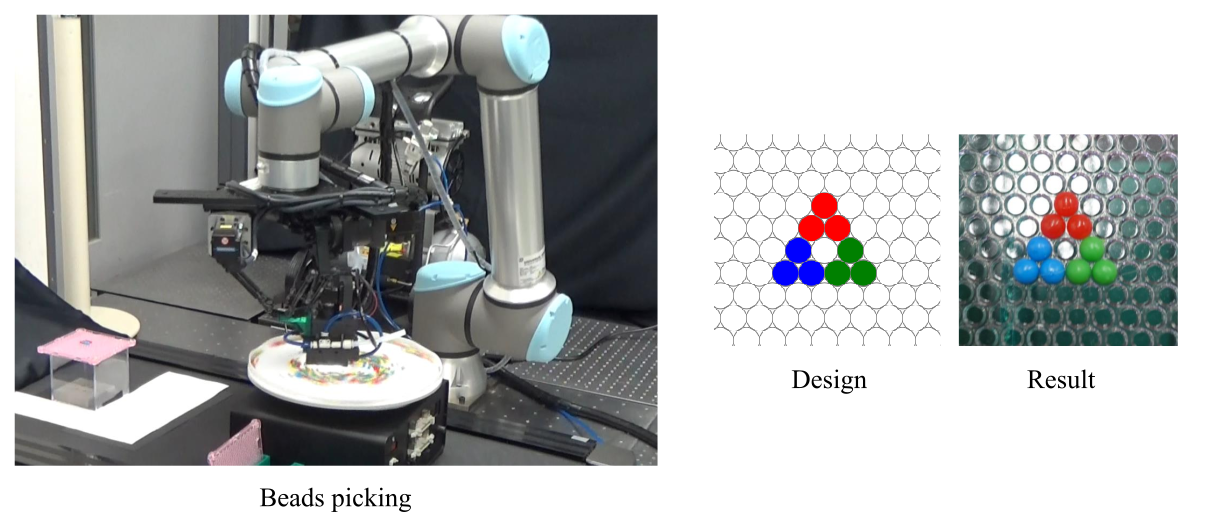
本研究では,オーダーメイドビーズアートの自動組立てを題材に,簡略化されたスマートマニュファクチャリングの実装を示す.具体的には,産業用ロボットアームの手先に三次元位置補償モジュールを搭載したシステムを用いて,ベルトコンベアに見立てた回転ステージ上のビーズをビックアップして,ビーズアートの作成を行う.ロボットを動的補償に基づいて制御することで,生産品質に直接影響を与えるリアルタイムでの作業対象に対する位置精度と,人間の介入や事前設定に頼ることなく,オンラインの変更や不確実性に長期的に適応できることを表す動作計画の知能化という,自動組立てに必要な相反する動作帯域の動作を両立することが可能である.
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- Kenichi Murakami, Shouren Huang, Masatoshi Ishikawa, Yuji Yamakawa: Fully Automated Beads Art Assembly towards Smart Manufacturing based on Dynamic Compensation Approach, Journal of Robotics and Mechatronics, Vol.34 No.5, pp.936-945 (2022) doi:10.20965/jrm.2022.p0936
- 村上健一,黄守仁,石川正俊,山川雄司: 動的補償を用いたビーズピッキング, 第40回日本ロボット学会学術講演会 (RSJ2022) (東京, 2022.9.8)/予稿集, 4C1-05