


Fully Automated Beads Art Assembly based on Dynamic Compensation Approach
Summary
Smart manufacturing within the context of Industrial 4.0 has become increasingly important in the context of
manufacturing evolution, which is changing from traditional high-volume, limited-species production to
low-volume, multi-species, short-cycle production.
Moreover, the significant damage to the supply chain caused by
the pandemic has proven the urgency to build next-generation manufacturing systems that are resilient to
future pandemics, requiring the strengthening of robotic automation and less reliance on humans.
In response to this, we have proposed Dynamic compensation to improve the
autonomy of industrial robots.
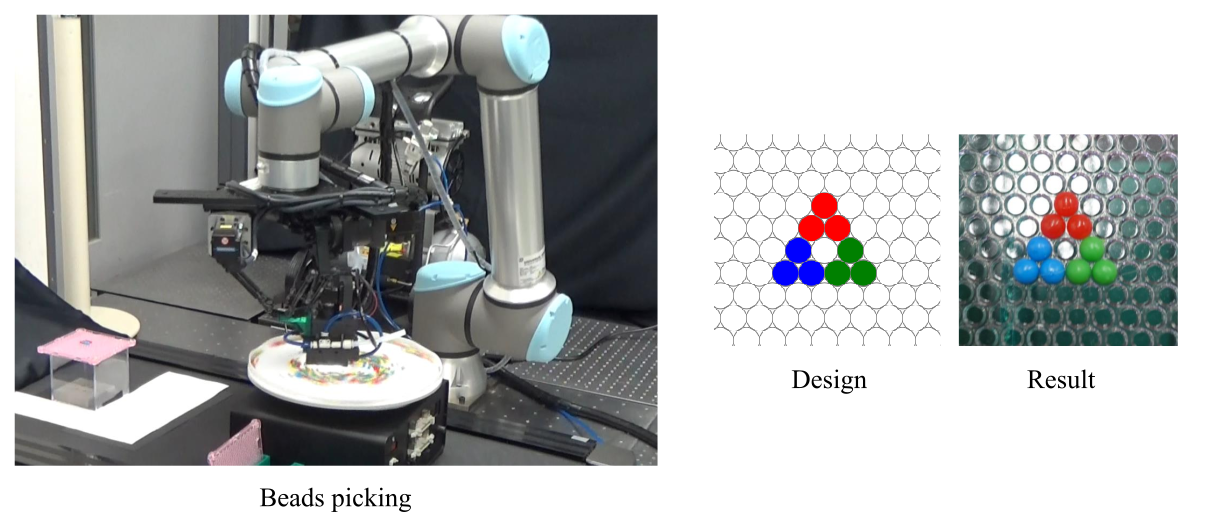
In this study, we demonstrate the implementation of a simplified scenario of smart manufacturing of
made-to-order bead art. Specifically, using a system equipped with a three-dimensional position
compensation module at the end of an industrial robot arm, the proposed system picks up beads on a
rotating stage that
resembles a belt conveyor and create bead art.
By controlling the robot based on dynamic compensation, it is possible to achieve conflicting bandwidths
behaviors required for automatic assembly: real-time positional accuracy of the working target, which directly
affects production quality, and intelligent motion planning, which represents long-term adaptation to online
changes and uncertainties without relying on human intervention or preconfiguration.
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact
Reference
- Kenichi Murakami, Shouren Huang, Masatoshi Ishikawa, Yuji Yamakawa: Fully Automated Beads Art Assembly towards Smart Manufacturing based on Dynamic Compensation Approach, Journal of Robotics and Mechatronics, Vol.34 No.5, pp.936-945 (2022) doi:10.20965/jrm.2022.p0936