


ホーム >
センサ フュージョン
> 高速ビジュアルフィードバックを用いた高速3次元位置補償システムの開発
高速ビジュアルフィードバックを用いた高速3次元位置補償システムの開発
概要
ユーザの多様なニーズの高まりに伴い,製造ラインは従来の少品種大量生産から多品種少量生産へ移行しており,機械や産業用ロボットの柔軟性や知能化が,求められている.
これに対して,我々は既存のロボットや人間が操作する機械の先に,高速なセンサ情報に基づいて高速なアクチェータを制御する補償モジュールを搭載する動的補償に基づく知能システムを提案しており,これまでに動的補償を用いたシステムを開発し様々なタスクを実現してきた.
しかし,先行研究では補償動作が 2 次元動作に限定されていた.
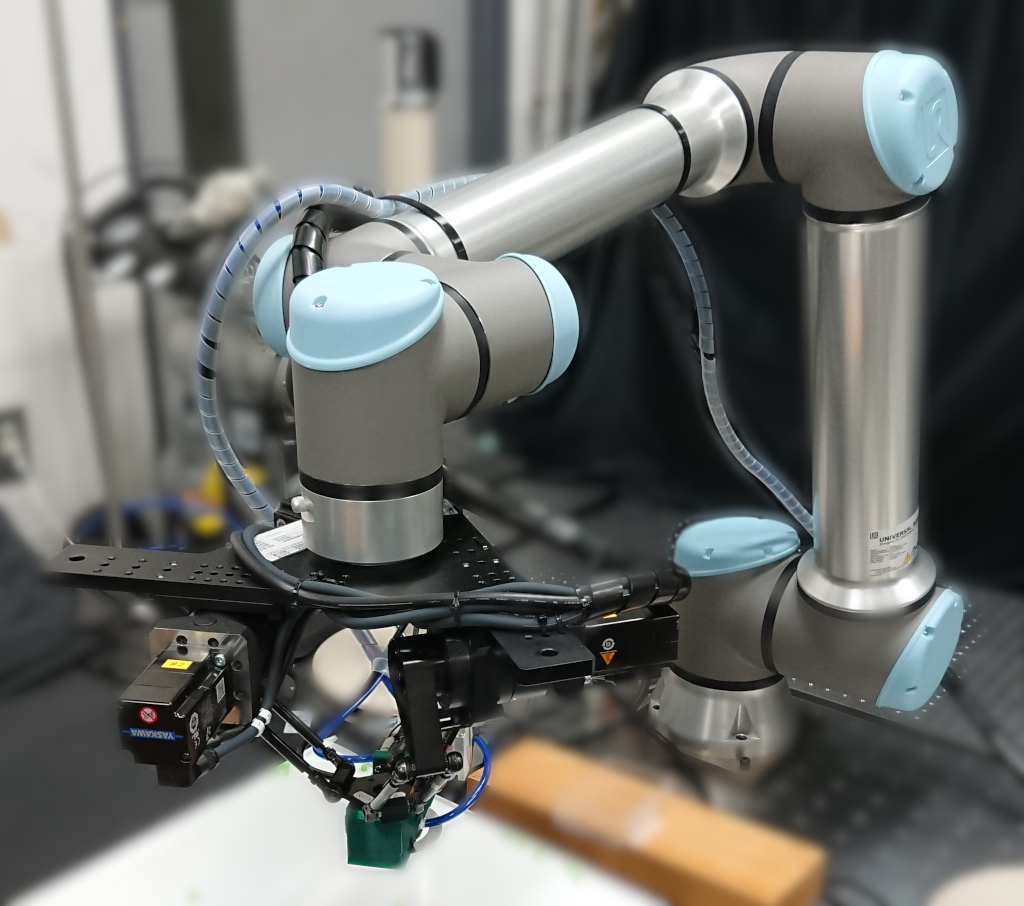
そこで,本研究では,高速,高精度な3次元動作を目指して,高速ビジュアルフィードバックを用いた高速3軸位置補償モジュールを開発した.具体的には,ロボットアームの手先に搭載できる小型軽量の3軸(x,y,z軸)デルタロボットであり,手先に高速ビジョンを搭載したシステムを構築した.
そして,レーザ変位計を用いて水平方向(x,y軸方向)精度の計測を行い,動作精度が,半径3mmの円軌道において20Hz以下であれば誤差は7%以下になること,繰返し位置精度が,z軸方向に水平方向の50%の移動があった場合でも移動距離の1.3%以下になることを確認した.
参考文献
- 村上 健一,黄 守仁,石川 正俊,山川 雄司: 高速ビジュアルフィードバックを用いた高速3次元位置補償システムの開発, 第22回計測自動制御学会システムインテグレーション部門講演会 (SI2021) (鹿児島,2021.12.16)/講演会論文集, pp.1403-1405.