


野球ロボット:投げる、見る、打つ、走る、捕る(撮影協力 東大野球部)
概要
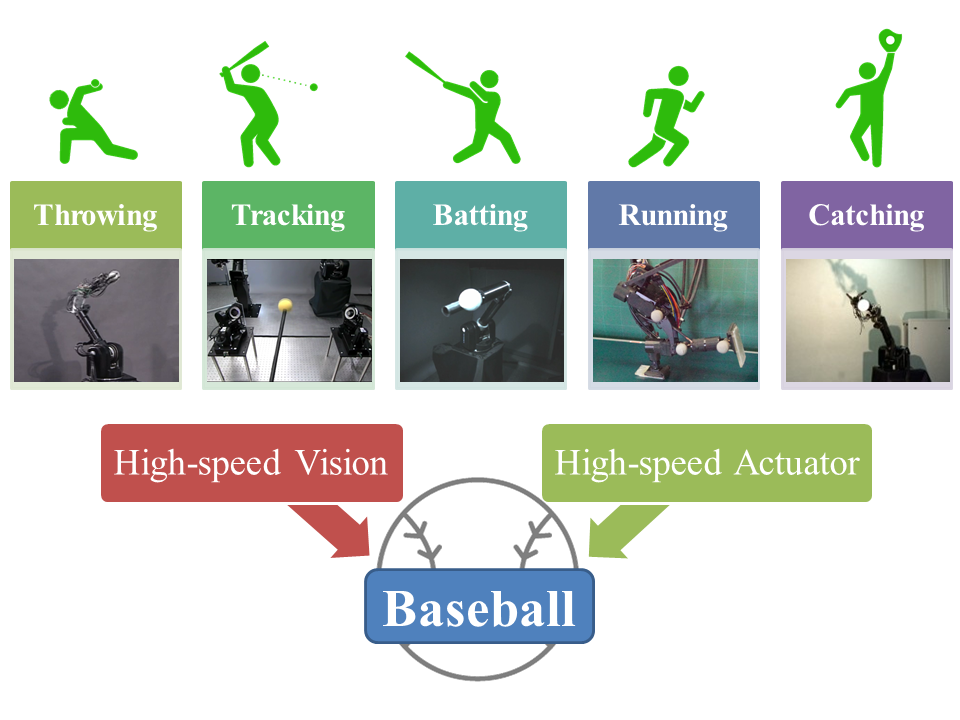
野球の基本要素である, 「投げる」, 「見る」, 「打つ」, 「走る」, 「捕る」動作に対して, 高速ビジョンと高速アクチュエータを組み合わせることにより, 要素毎にロボットで実現しました. 一体化した動作は, まだ実現しておりませんが, 技術要素として一つのまとまりがついたと思いますので, 整理致しました.
| 投げる: | 高速ロボットハンドと高速アームを用いて正確な投球動作を実現しました. 人の投球動作「キネティックチェーン」を参考にした波動の位相伝播に基づく運動の高速化により, 高速な投球動作を実現しています. 90%の確率でストライクゾーンに投げ入れることが可能です. | |
| 見 る: | AVS(アクティブビジョンシステム)では, 高速カメラを高出力なパン・チルト雲台に搭載し, ビジュアルフィードバック制御を行うことにより, 広い範囲を高速にトラッキングすることが可能となります. また, 1ms Auto Pan/Tilt技術はカメラ自体ではなく, 2枚のミラーで視線を制御することでより高速な対象物のトラッキングが実現されています. | |
| 打 つ: | 高速ビジョンにより計測された1msごとのボールの動きに合わせてアームを制御することで, 定義したストライクゾーンに来たボールを100%打ち返すことができる バッティングロボットを実現しました. 高速アクティブビジョンによって必要なボールの位置情報が全て得られるため, 予測や学習を用いることなく, 極めてシンプルな制御方法で実現しています. また, 平らなバットを用いて, 当てるだけでなく, 狙った所に打ち返すロボットを実現しています. | |
| 走 る: | 軽量かつ高速なモータを用いた小型で高速な駆動機構と高速ビジョンを用いたロボットの状態・姿勢の高速認識により, 前傾姿勢で走行することができる 高速走行ロボットを実現しました. 従来は, ZMP規範を用いた制御が主流ですが, このロボットでは, ZMP規範を用いず, 走行姿勢として不安定な領域も使用しております. 脚長14cmで4.2km/hの走行を実現しています. | |
| 捕 る: | 1秒間に180度の開閉動作が10回可能な高速なハンドを用いて, ハンドを固定したシステムと, 高速なロボットアームに取り付けたシステムを実現しました. 両方とも, 高速ビジョンから得られるボールの動きに合わせて制御することで,(捕球可能な範囲は異なりますが)飛んできたボールの捕球を実現しています. |
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
関連研究
投げる ボールを正確にストライクゾーンに投げることができるスローイングロボット:3本指ハンドを用いています.
ボールを正確にストライクゾーンに投げることができるスローイングロボット:3本指ハンドを用いています.波動伝播に基づく高速スローイング動作 
 「ロボットが投げたボールをロボットが打つ」システムの開発
|
見 る ボールの回転まで見えます. 1msオートパン・チルト
列並列ビジョン (CPV) による高速ターゲットトラッキングシステム
|
打 つ ストライクゾーンに入ってくるボールを100%打ち返すバッティングロボット:打撃方向の制御も可能です.
ストライクゾーンに入ってくるボールを100%打ち返すバッティングロボット:打撃方向の制御も可能です.多関節マニピュレータを用いた高速打撃動作
高速打撃動作におけるボール制御
|
走 る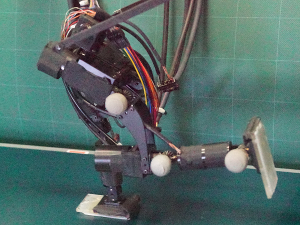 ZMP規範を用いずに, 高速ビジョンを用いて前傾姿勢で走るロボット:脚長14cmで4.2km/hを実現.
ZMP規範を用いずに, 高速ビジョンを用いて前傾姿勢で走るロボット:脚長14cmで4.2km/hを実現.高速ビジュアルフィードバックを用いた高速二足走行
|
捕 る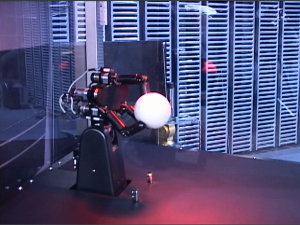 飛んで来るボールを高速ビジョンとハンドで捕球するロボット:固定ハンド版とアーム+ハンド版があります.
飛んで来るボールを高速ビジョンとハンドで捕球するロボット:固定ハンド版とアーム+ハンド版があります.高速キャッチングシステム
反転動作を用いた高速キャッチング
|
謝辞
ビデオ映像の作成では, 許可をいただいて, 東京大学野球部の練習を撮影させていただきました. 撮影をお許しいただいた東京大学野球部並びに関係者の皆様に感謝申し上げます. 石川グループ研究室は, 東京大学野球部を応援しています.