


高速ビジュアルフィードバックを用いた高速二足走行
| ハードウェアと制御手法の両方を刷新することで,人間を超えた機械システムの限界を追求することを目標に, 高速ビジュアルフィードバックを用いた二足走行ロボットシステム”ACHIRES”(Actively Coordinated High-speed Image-processing Running Experiment System) を開発し, その第一ステップとして高速走行を実現しました. |
 概要
概要
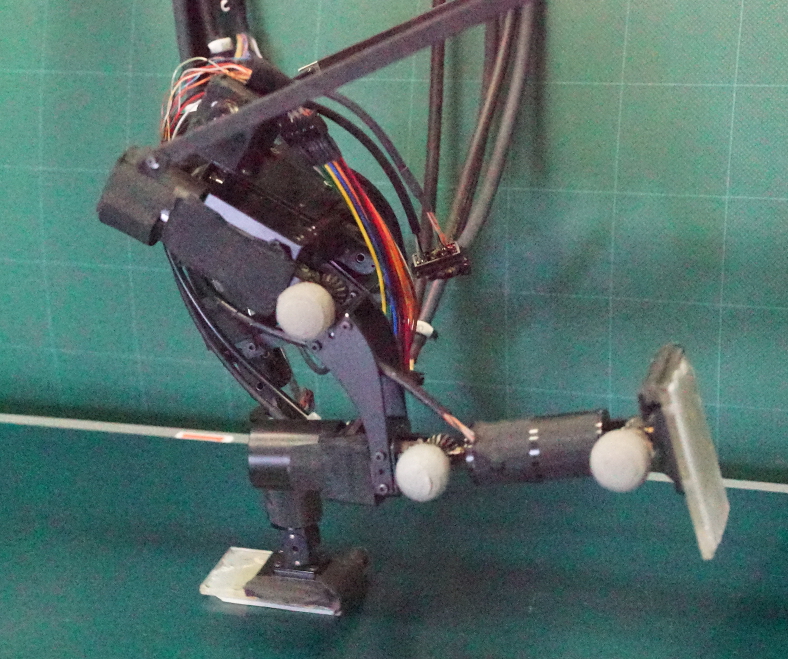
高速ロボットハンドの開発およびその応用で培われた技術を基盤として,新たに高速ビジュアルフィードバックを用いた二足走行ロボットシステム(ACHIRES)を開発しました. このシステムは,独自に開発した2つの要素技術を融合したもので,世界トップクラスのスピードで高速走行を実現しました.
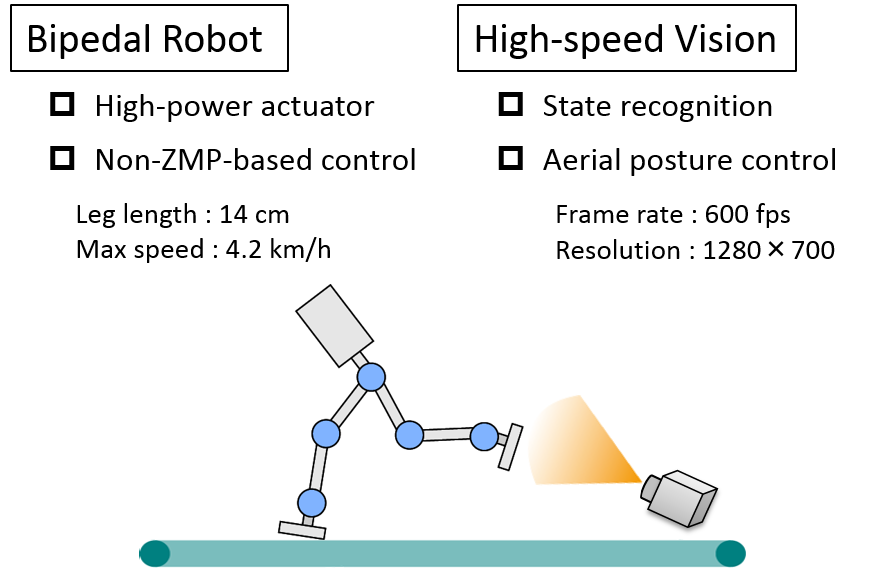
要素技術の1つは高速二足走行機構で,当研究室がこれまでに開発してきた高速多指ハンド(じゃんけんロボット等)と同じ技術をベースとした小型のメカニズムです. ここで用いられている軽量かつ高出力なモータによって,地面を瞬間的に力強く蹴って加速する動作と空中で着地姿勢へ高速に復帰する動作が可能となっています.
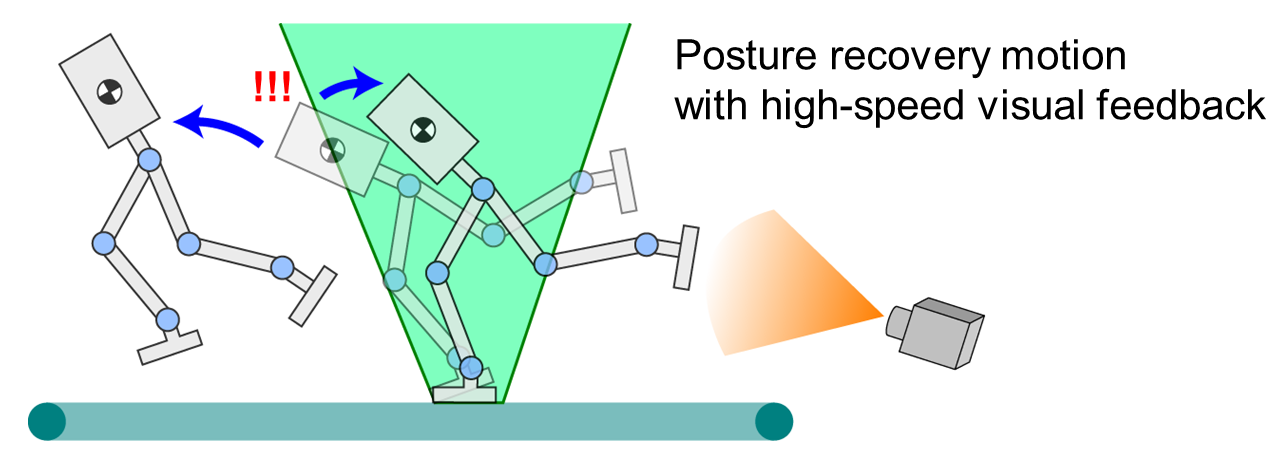
もう一つの要素技術は高速ビジョンで,今回は環境側に設置したカメラの画像に対して,1秒間に600枚の処理を行い,ロボットの状態・姿勢を高速に認識することにより,走行姿勢を安定に保つことを可能にしています.
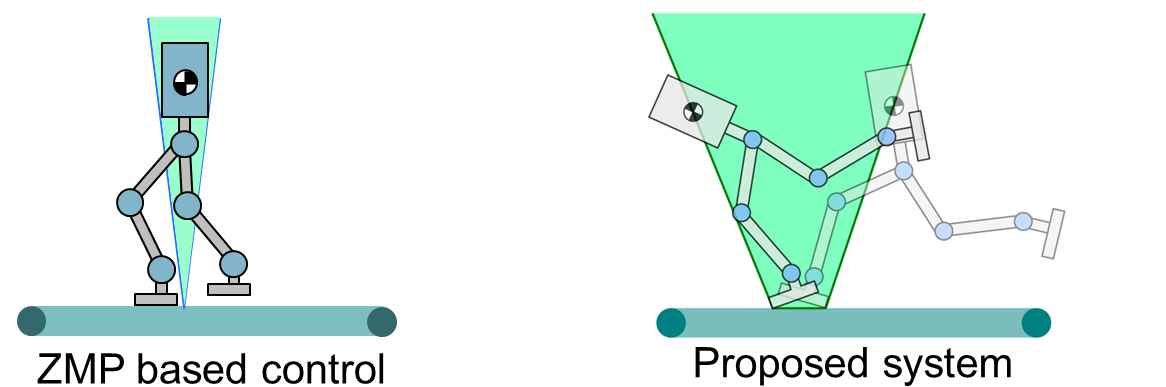
これらの要素技術を用いて,従来とはまったく違う方法によって高速走行を実現しています. 従来の二足走行システムは,安定性が確保されたZMP規範の制御法を用いて,転倒しない姿勢の範囲で走行を実現していました. ACHIRESは,上述した2つの要素技術によって,不安定な姿勢でも転倒を回避するための瞬間的な反応動作が可能であることから, 簡易な制御手法でより前傾した姿勢を取ることが可能となり,安定な高速走行を実現しています. 今回は脚長14cmのロボットで,走行速度4.2km/hを実現しています. 加えて,空中転回も実現しています.
ACHIRESは,従来のロボットの動作速度を凌駕する運動性能と人間を超える高速の認識機能から実現したものと考えています. 今回の成果は,勝率100%のじゃんけんロボットと同じ基盤技術を初めて脚ロボットに応用したもので, 当研究室が目指している人間を超える能力を有するロボットの研究を加速するとともに, 今後のロボット技術を飛躍的に拡大する可能性を示唆するものと考えています.
 |
 |
 |
 |
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- 梅村 元,玉田 智樹,五十嵐 渉,米山 大輝,田中 和仁,妹尾 拓,山川 雄司,石川 正俊:ダイナミックな脚運動の実現に向けた二足走行実験システムACHIRESの機構改良,日本機械学会ロボティクスメカトロニクス講演会2015 (Robomech 2015) (京都,2015.5.18) / 講演会論文集,1P2-B02
- Tomoki Tamada, Wataru Ikarashi, Daiki Yoneyama, Kazuhito Tanaka, Yuji Yamakawa, Taku Senoo and Masatoshi Ishikawa: High-speed Bipedal Robot Running Using High-speed Visual Feedback, 2014 IEEE/RAS International Conference on Humanoid Robots, (Madrid, Spain, 2014.11.19) / Proceedings, pp.140-145 (2014)
- 玉田 智樹,五十嵐 渉,米山 大輝,田中 和仁,山川 雄司,妹尾 拓,石川 正俊:高速ビジュアルフィードバックを用いた高速二足走行,日本ロボット学会第32回学術講演会 (RSJ2014) (福岡,2014.9.4) / 講演論文集,1B2-03