


ホーム >
システム ビジョン デザイン > 運動/変形物体の高速リアルタイム3次元センシング
運動/変形物体の高速リアルタイム3次元センシング
概要
1kHz のサンプリングレートと数ms のレイテンシでの高速センシングが,様々な問題を解決し,新たな応用を創出することが明らかにされつつある. しかし,従来の3次元センシングでは静止した物体の観測が主流であり,物体が運動・変形する局面に対して,十分な機能を有するものが存在しなかった.
直面する課題は,運動する物体を捉える原理とセンシング速度の2点である. このような課題を克服した超高速のリアルタイム3次元センシングシステムは, ロボティクス,工業製品検査,自動車応用,マンマシンインターフェースにおいて,強力な役割を果すことが期待される.
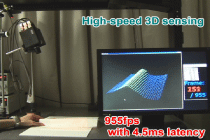
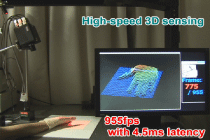
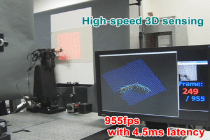
我々が新たに開発した3次元センシングシステムは,1,100 点のマルチスポットパターンを投影することで, 単一の撮像画像から形状を取得し,さらに,独自の超並列画像処理システムによって, 秒間1,000回の速度で画像を3次元点の情報へ変換することができる. このような高速3次元センシング技術を用いて,従来にはなかったデジタルアーカイブ応用や, インタラクティブディスプレイシステムを実現した. また,3次元センシングを支える情報処理技術として,超高速に取得された形状情報を用いて, 高解像度の形状を復元する技術も開発している.


動画
参考文献
- 渡辺義浩,石川正俊 : 高速3次元センシングの実現とその新応用, 第57回応用物理学関係連合講演会 (神奈川, 2010.3.18)/講演論文集, p. 173. [論文], [プレゼン資料]
- 渡辺義浩, 小室孝, 石川正俊:多点瞬時解析高速ビジョンによる運動/変形物体のリアルタイム3次元センシング, 日本ロボット学会誌, Vol.25, No.6, pp.1005-1013, 2007 [PDF] 第22回 日本ロボット学会 論文賞
- Yoshihiro Watanabe, Takashi Komuro, and Masatoshi Ishikawa : 955-Fps Real-Time Shape Measurement of a Moving/Deforming Object Using High-Speed Vision for Numerous-Point Analysis, 2007 IEEE International Conference on Robotics and Automation(ICRA'07) (Roma, 2007.4.11)/Proceedings, pp.3192-3197 [PDF] *IEEE
- 渡辺義浩, 小室孝, 石川正俊: 多点瞬時解析高速ビジョンシステムによる運動・変形物体のリアルタイム形状計測, 第24回日本ロボット学会学術講演会 (岡山,2006.9.15)/予稿集, 2B17 [PDF]