


テレピンポン:ITを用いたワームホールの検証実験
概要
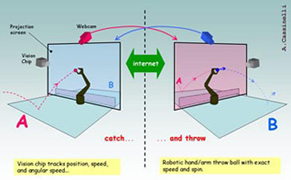
満渕研究室と 下条研究室の協力を得て、 ロボットベースの遠隔現実感システムを開発した[1].このシステムは、 ユーザーが 遠くにある対象物を認知し触れ合うことを可能にするもので、 先進的な遠隔現実感システムである.このプロジェクトでは、この成果を用い、 物理的な対象物に対してインターネットを通した遠隔操作をシミュレートする人工的なワームホールのようなシステムへレベルアップを図ろうとしている. 物理的対象のすべての構造がインターネットを通して伝達できるのであれば、 遠隔地ではその情報に基づいて対象物を再構成できるはずである.このことは、 SFのテレポーテーションに近いものとなる.今回、 離れたところでピンポン球を遠隔操作してピンポンを行うシステムを構築した. 高速トラッキングにはシステム ビジョン デザイン[2]を用い、 ピンポン玉の状態(位置、速度、 回転 [4]) を測定し、投球/キャッチロボット [5]で用いた高速ロボットを用いることにより、双方でピンポン球を操作できるようになる.
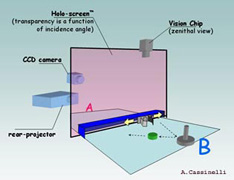


研究室で既に開発済みの ビジョンチップベースのエアホッケーシステム [3]を用いてプロトタイプシステムを開発し、実証実験を行った.現在、これを改良して、 電磁的なキャッチャーと発射装置に高速のリニアアクチュエータを用いることで、 正確な運動を再現するシステムを設計している[6].伝達時間遅れは避けようがないが、 発射のタイミングは予測を導入して補償し、実際のキャッチの前にデータを送ることが可能である.
動画
参考文献
- Makoto Shimojo, Takafumi Suzuki, Akio NAMIKI, Takashi Saito, Masanari Kunimoto, Ryota Makino, Hironori Ogawa, Masatoshi ISHIKAWA, and Kunihiko Mabuchi : Development of a System for Experiencing Tactile Sensation from a Robot Hand by Electrically Stimulating Sensory Nerve Fiber, 2003 IEEE International Conference on Robotics and Automation (Taiwan, 2003.9.16)/pp.1264-1270
- Takashi Komuro, Idaku Ishii, Masatoshi Ishikawa and Atsushi Yoshida : A Digital Vision Chip Specialized for High-speed Target Tracking, IEEE transactions on Electron Devices, Vol.50, No.1, pp.191-199 (2003) [PDF]
- Vision Chip based Air Hockey Game (developed with SEIKO Precision, Inc.)
- Yoshihiro Watanabe, Takashi Komuro, Shingo Kagami and Masatoshi Ishikawa : Real-time Visual Measurements using High-speed Vision, Optics East (Philadelphia, 2004.10.28)/Machine Vision and its Optomechatronic Applications/Proceedings of SPIE Vol.5603, pp.234-242 [PDF]
- Akio Namiki, Yoshiro Imai, Taku Senoo, and Masatoshi Ishikawa : Dynamic Manipulation Using High-speed Multifingered Hand-Arm System -Grasping, Catching, and Batting-. 2004 IEEE International Conference on Robotics and Automation (New Orleans, 2004. 4.26-5.1)/Video Proceedings, No.L
- N. Danbara : Master thesis, University of Tokyo (2005.2), In Japanese only [PDF-8MB].