


Tele-ping pong: proof-of-principle of an IT-engineered wormhole
Summary
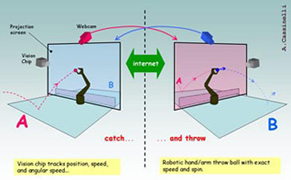
Robotic-based tele-existence has been studied in our lab in collaboration with Mabuchi Lab and Shimojo Lab [1]. This was an advanced form of tele-presence allowing the user to feel and interact with object at a distance. With this project we try to bring the experience to the next level by simulating the teleportation of a physical object through internet, thus creating an artificial (IT-engineered!) gravitational wormwhole. One can argue that, if all the structural information of a physical object could be transmitted through internet, and then on the other side a machine could exactly reconstructs the object based on this information (very much like "total fax" machine), this would be, if not exactly the same, something very close to SF-teleportation. We then set ourselves to simulate the teleportation of a ping-pong ball in a ping-pong game where the users are very far away from each other. Thanks to vision-chip based high-speed tracking [2], we can acquire in real time all the parameters of the relevant phase space of the ball (namely, its position, speed and spin [4]). Then, using high-speed and high-precision robotic arms such as the one used in our catching/throwing experiments [5], one can in principle catch the ball on one side, and throw another ball on the other side - with copied, identical dynamical parameters.
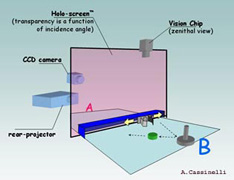


A prototype system was developed and successfully demonstrated in two dimensions, taking advantage of the research already done in our lab on a vision chip-based air-hockey system [3]. This configuration (namely a tele-air hockey system) was discussed in 2005 with a researcher in Australia who then went on developing a very similar system but without real transmission of the puck momentum, nevertheless demonstrating the thrilling possibilities of social interaction generated by physical games at a distance. We are now designing an electromagnetic catcher/ launcher mounted on a high-speed linear motor (THK GLM10) to exactly reproduce the momentum of the puck [6]. The delay for transmission is incompressible (not a real gravitational wormhole!), but the robot launching-time (i.e. setting the linear motor to the right speed/position) can be compensated by predicting the projectile trajectory and sending this data before the actual ball is caught in front of the screen.
Movies (preliminary experiments)
References
- M. Shimojo, T. Suzuki, A. NAMIKI, T. Saito, M. Kunimoto, R. Makino, H. Ogawa, M. Ishikawa and K. Mabuchi : Development of a System for Experiencing Tactile Sensation from a Robot Hand by Electrically Stimulating Sensory Nerve Fiber, 2003 IEEE International Conference on Robotics and Automation (Taipei, Taiwan, 2003.9.16) pp.1264-1270.
- T. Komuro, I. Ishii, M. Ishikawa and A. Yoshida: A Digital Vision Chip Specialized for High-speed Target Tracking, IEEE transactions on Electron Devices, Vol.50, No.1, pp.191-199 (2003) [PDF]
- Vision Chip based Air Hockey Game (developed with SEIKO Precision, Inc.)
- Y. Watanabe, T. Komuro, S. Kagami, M.Ishikawa: Real-time Visual Measurements using High-speed Vision, Optics East (Philadelphia 2004.10.28) / Machine Vision and its Optomechatronic Applications, Proceedings of SPIE Vol. 5603, pp. 234-242. [PDF].
- A. Namiki, Y. Imai, T. Senoo and M. Ishikawa. Dynamic Manipulation Using High-speed Multifingered Hand-Arm System -Grasping, Catching, and Batting-. 2004 IEEE International Conference on Robotics and Automation. (New Orleans, USA, 2004. 4.26-5.1) / Video Proceedings, No.L.
- N. Danbara Master thesis, University of Tokyo (Feb. 2005). In Japanese only [PDF-8MB].