


ホーム >
センサ フュージョン > ロボットハンドからの接触感覚を触覚神経経由により提示するシステムの開発
ロボットハンドからの接触感覚を触覚神経経由により提示するシステムの開発
概要
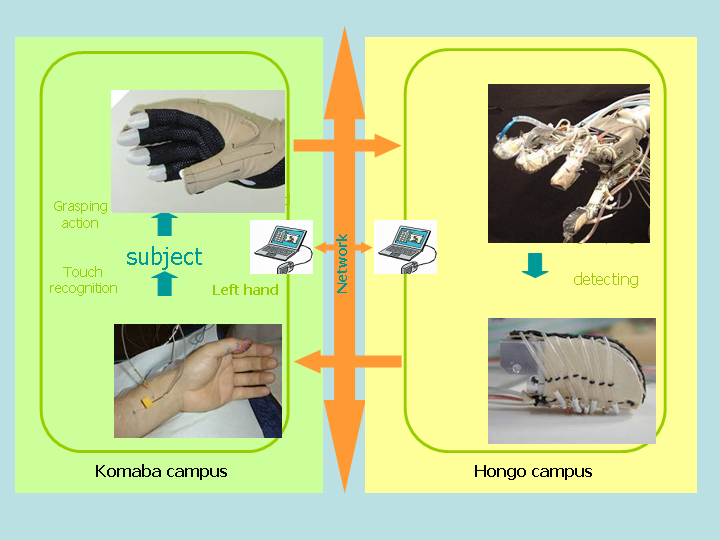
触覚センサを装着したロボットハンドの把持動作により生じた触覚情報を, 触覚神経経由で生体に伝達するシステムを構築しました.システムは被験者とロボットハンド側の2つに分かれており, 相互をネットワークにより接続しています. 被験者が右手により把持動作を行うと,その動作をサイバーグローブにより計測し, ネットワーク経由でロボットハンド側に伝送して,ロボットハンドを制御します. 把持動作によって生じた対象物との接触状態を触覚センサにより検出し, 再度ネットワーク経由で 被験者側に伝送し, 被験者の左腕の触覚神経系に挿入した微小電極により神経線維に電気刺激 (パルス列)を与え生体に提示します.被験者は提示された感覚強度を足元のペダルにより表現します. 実験の結果,触覚センサの出力変化に応じて被験者が申告する感覚強度に変化が生じていることが確認できました. (本研究は, 東大 満渕研究室, 電通大 下条研究室 との共同研究です.)

システム構成
被験者は,左腕の触覚神経系に満渕グループで開発した神経インタフェースを埋め込みます. また,右腕にはロボット操作用に,サイバーグローブを装着します.一方,ロボットには, 下条グループで開発した高密度触覚センサを, 石川グループで開発した4本指ロボットハンド上に装備しました. ロボットと人間は,お互いにネットワークで接続することで,感覚情報と運動指令の送受信をリアルタイムで行います.
実験
実際の実験の様子を示します.
- (写真左上) 被験者の右手.サイバーグローブにより操作を行う.
- (写真右上) 触覚センサを装備したロボットハンド.ゴムボールが指先に接触している.
- (写真右下) 触覚情報の大きさをリアルタイムに表示している.
- (写真左下) 被験者に与えられる触覚情報,神経刺激のそれぞれの電気信号を表示している. 同時に,被験者が実際に感じた触感を定性的に表示している.
動画
関連ページ
参考文献
- 下条誠, 牧野了太, 小川博教, 鈴木隆文, 並木明夫, 齋藤敬, 國本雅也, 石川正俊, 満渕邦彦: ロボットハン ドからの触覚情報を人間の触覚神経経由により提示するシステムの開発, 日本ロボット学会創立20周年記念学術講演会 (大阪, 2002.10.12)/講演論文集, 1E33
- 下条誠, 牧野了太, 小川博教, 鈴木隆文, 並木明夫, 斎藤敬, 石川正俊, 満渕邦彦: ロボットハンドからの接触感覚を触覚神経経由により提示するシステムの開発, 日本機械学会ロボティクス・メカトロニクス講演会'02 (松江, 2002.6.9)/講演論文集, 2P2-E08