


ホーム >
センサ フュージョン >
小型・低摩擦アクチュエータMagLinkageを備えた多指ハンドシステム
小型・低摩擦アクチュエータMagLinkageを備えた多指ハンドシステム
概要
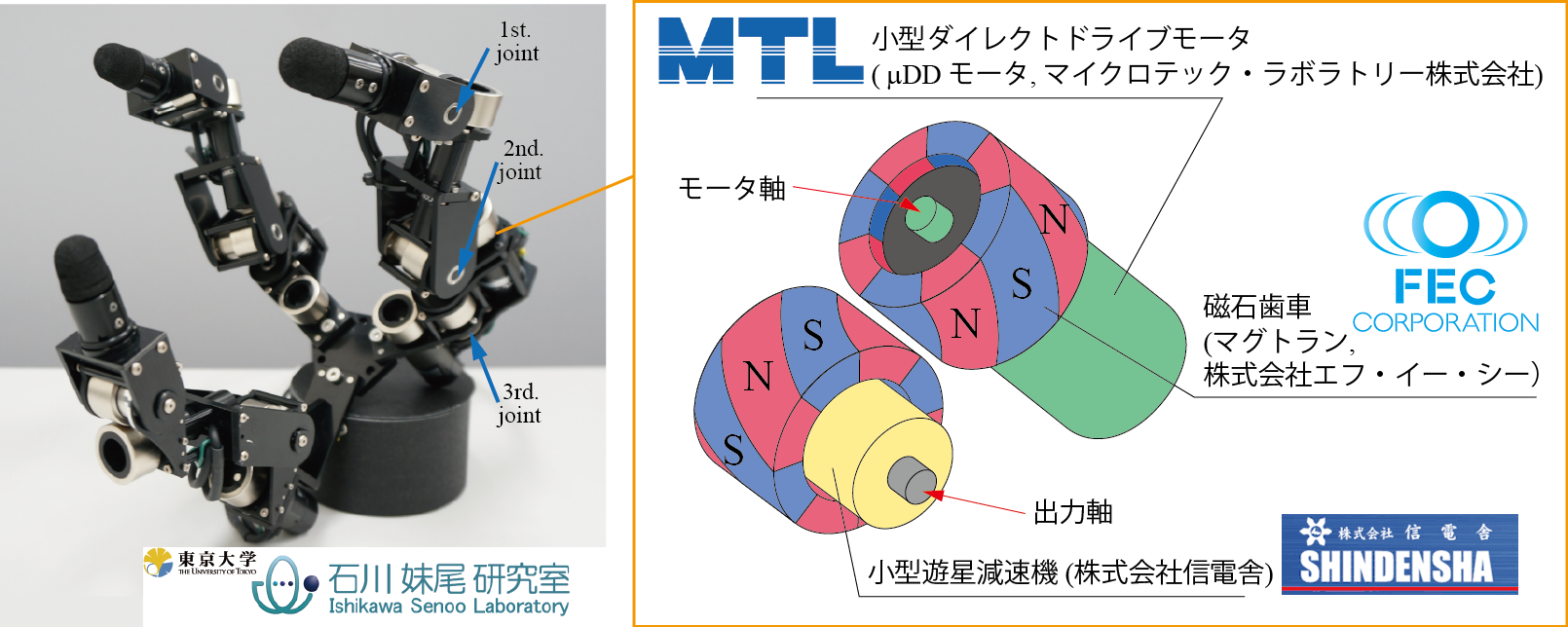
ダイナミックな接触検知と衝撃吸収制御を可能とする新しいアクチュエータ"MagLinkage"を備えた多指ハンドを開発しました. MagLinkageは小型ダイレクトドライブモータ(μDDモータ,マイクロテック・ラボラトリー株式会社),小型遊星減速機(株式会社信電舎), 磁石歯車(マグトラン,株式会社エフ・イー・シー)の3つの要素部品で構成されます. 出力軸側に負荷が加わった際にわずかなトルクで逆回転し,この回転量をモータ側のエンコーダで正確に計測できることが特徴です. この特徴を利用することで,外界センサレスで広ダイナミックレンジな仮想バネ・ダンパ特性を実現できます. また,出力軸側に過負荷が加わった際は磁石歯車が脱調するため,トルクリミッタ機能も備えています.
|
MagLinkageハンドを用いて,当研究室が過去に提案した「衝撃吸収制御(Maxwellモデル制御)」を実現しました. さらにこのハンドと衝撃吸収制御の組み合わせにより,机上の薄い物体を高速にスライドさせ掴み上げる動作に成功しました.これは従来の位置決めハンドでは非常に難しいタスクです. ダイナミックな衝撃吸収特性が重視されるタスクではMagLinkageハンドを使用し, 高速・精密な位置決め性能を重視する場合は「軽量高速多指ハンドシステム」を 使用することで1ms高速視・触・近接覚センシングの応用展開を拡大できると考えています.
協力
MagLinkageは マイクロテック・ラボラトリー株式会社, 株式会社エフ・イー・シー, 株式会社信電舎 に技術支援を頂き開発しました.
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- 小山佳祐,下条誠,妹尾拓,石川正俊:小型・低摩擦アクチュエータMaglinkageの開発とハンド応用, 日本機械学会ロボティクスメカトロニクス講演会2019(Robomech2019) (広島,2018.6.7) / 講演会論文集,2P1-H02.
- 小山佳祐,下条誠,妹尾拓,石川正俊:小型・低摩擦アクチュエータ"MagLinkage"を用いた定衝撃・ノンストップ把持, 第37回日本ロボット学会学術講演会(RSJ2019) (東京,2019.9.6) / 講演会論文集,3E-2.