


Multifingered Hand System equipped with compact size, low-friction actuator "MagLinkage"
Summary
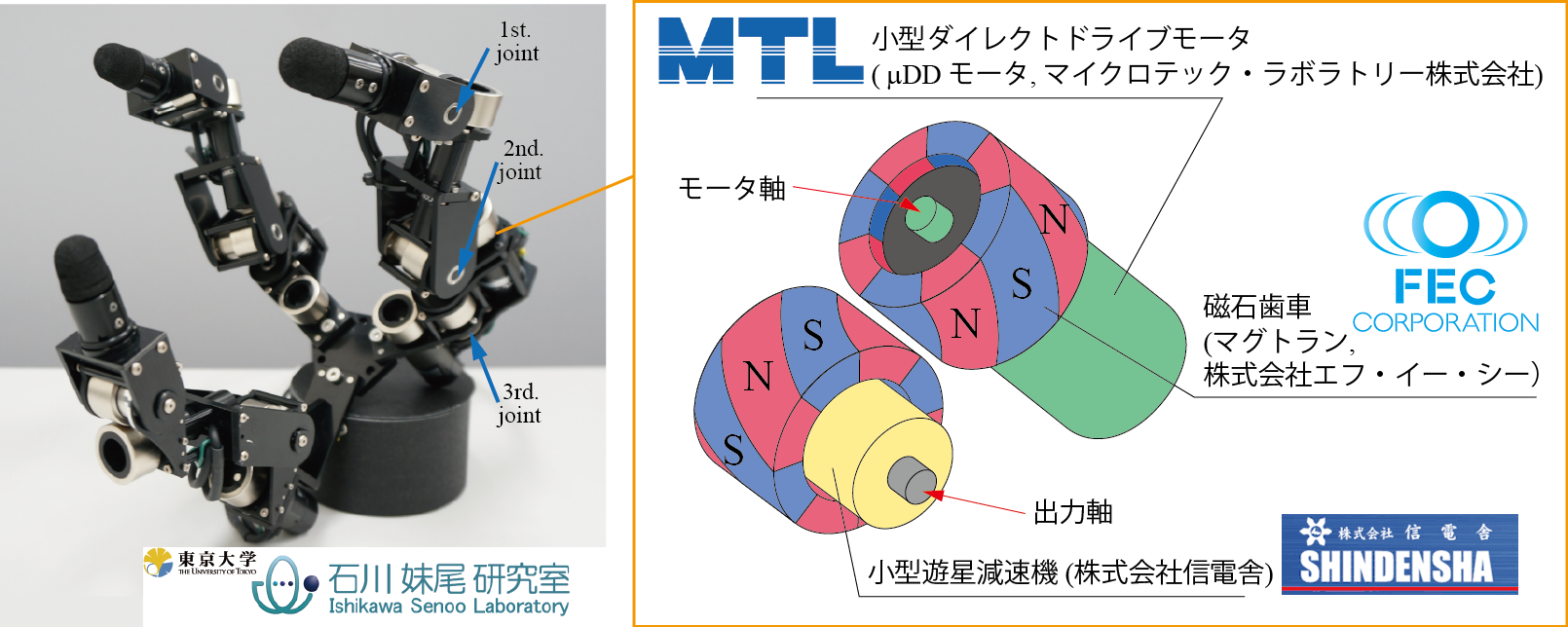
We developed compact size, low-friction and high-torque actuator "MagLinkage" which enables dynamic shock absorption control. MagLinkage is consisted of a compact size DD motor (μDD motor, MTL inc.), low-reduction ratio and compact-size gear box (Shindenssha), and magnet gear (MagTran, FEC inc.). When a load is applied to the output shaft side, it rotates with a slight torque, and this angle change can be accurately measured with the encoder on the motor side. MagLinkage realizes a virtual spring / damper characteristic with a wide dynamic range and no external sensor. A torque limiter function is also provided because the magnet gear will step out when an overload is applied to the output shaft.
|
We realized "the shock absorption control (Maxwell model control)" proposed by our laboratory using the MagLinkage hand. The MagLinkage hand can slide and grasp a thin object on the table. By sliding the object with high speed and soft touch, the hand succeeded in grasping one piece from the pile of cards. This is a difficult task with a typical robot hand. The MagLinkage hand is suitable for high-speed and dynamic shock absorption control. For high-speed and precise positioning control, it is suitable to use the "lightweight high-speed multi-finger hand system". Applications of 1ms high-speed sensing (vision, proximity and tactile) can be expanded by using an appropriate hand depending on an application.
Thanks
MagLinkage was developed with technical support from Microtech Laboratories, Inc., FEC, Inc, , Shindensha, Inc.
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
Reference
- Keisuke Koyama, Makoto Shimojo, Taku Senoo, Masatoshi Ishikawa: Development and Application of Low-friction, Compact Size Actuator “MagLinkage", The Robotics and Mechatronics Conference 2019 in Hiroshima (ROBOMECH2019) / proceedings, 2P1-H02 (in Japanese).
- Keisuke Koyama, Makoto Shimojo, Taku Senoo, Masatoshi Ishikawa: Non-stop, Small-Impact Force Grasping Strategy using Compact Size, Low-friction Actuator “MagLinkage", Robotics Society of Japan Conference in Tokyo (RSJ2019) / proceedings, 3E-2 (in Japanese).