


ホーム >
センサ フュージョン > 塑性変形モデルを用いたロボットアームのインピーダンス制御設計
塑性変形モデルを用いたロボットアームのインピーダンス制御設計
概要
通常のインピーダンス制御は,基本的にバネとダンパを並列に接続したVoigtモデルをベースとしている. そのため,外力に応じて移動する手先に対して,変位の元の位置へ戻るような反発力が常に発生している. 同時に,位置の目標値を明示的に設定する必要があるため,接触後において滑らかな受動的挙動を生成することには不向きである. よって,飛来するボールを受け止めるキャッチング動作では,フォロースルー時に衝突方向とは反対に押し返す運動になる可能性があり,把持状態へ移行する前に対象が手先から離脱してしまう原因となる.
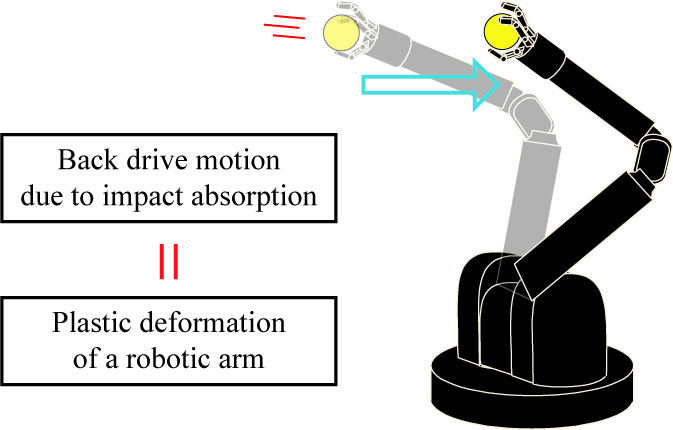
本研究では,インピーダンス制御によって受動的かつ低反発なキャッチング軌道を生成するための手法を提案した. 衝撃によるバックドライブモーションをロボットの塑性変形と捉えることで,Maxwellモデルに基づく衝撃吸収を実装した. Maxwellモデルにおけるバネとダンパの接続形態に関して,直列表現と並列表現の等価変換が存在することを示した. 並列表現ベースと直列表現ベースの制御則を提案し,多関節アームを用いた物理シミュレーションによって有効性を示した. Maxwellモデルの衝撃吸収への適用は,実機実験によるビジュアルショックアブソーバによっても有効性を確認している.
動画
参考文献
- Taku Senoo, Masanori Koike, Kenichi Murakami and Masatoshi Ishikawa: Impedance Control Design Based on Plastic Deformation for a Robotic Arm, CASE 2016 (Fort Worth, Texas, 2016.8.23) / IEEE Robotics and Automation Letters, Vol. 2, No. 1, pp. 209-216, 2017. [link]
- 妹尾拓, 小池正憲, 村上健一, 石川正俊: 受動的緩衝動作における直列表現ベースの塑性変形制御, 第34回日本ロボット学会学術講演会 (山形, 2016.9.9) / 講演論文集, 3E2-08.
- 妹尾拓, 小池正憲, 村上健一, 石川正俊: インピーダンス制御によるマニピュレータの可塑的挙動生成, 第21回 ロボティクスシンポジア (長崎, 2016.3.17) / 講演論文集, pp. 111-116, 2016. 優秀論文賞
- 妹尾拓, 小池正憲, 村上健一, 石川正俊: 塑性変形モデルを用いたロボットアームのインピーダンス制御設計, 第16回 計測自動制御学会 システムインテグレーション部門講演会, (名古屋, 2015.12.14)/ 講演会論文集, pp.158-160, 2015. 優秀講演賞