


勝率100%のじゃんけんロボット(人間機械協調システムの実現)
概要
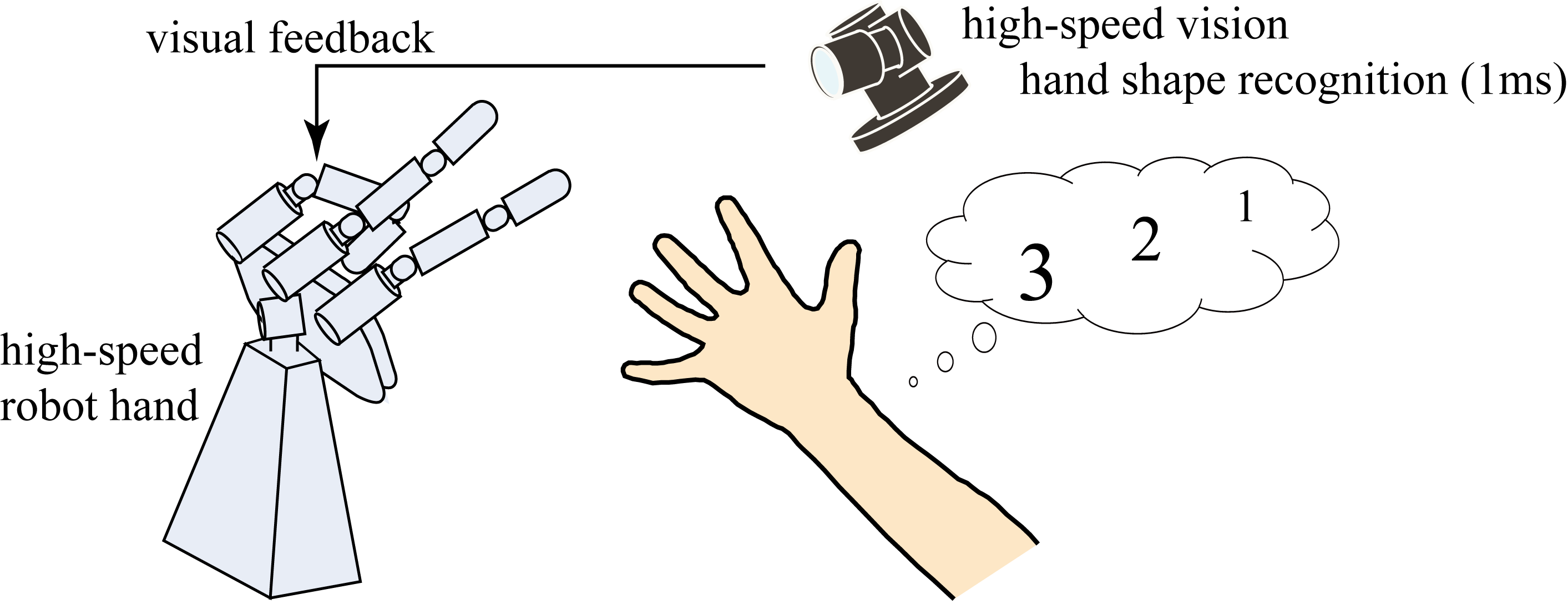
本研究では,人間機械協調システムの一例として勝率100%のじゃんけんロボットを開発している. 人間は,じゃん・けん・ポンのタイミングでグー,チョキ,パーのいずれかを出すものとし, そのタイミングに合わせて,ロボットハンドは人間に勝つ「手」を出す.
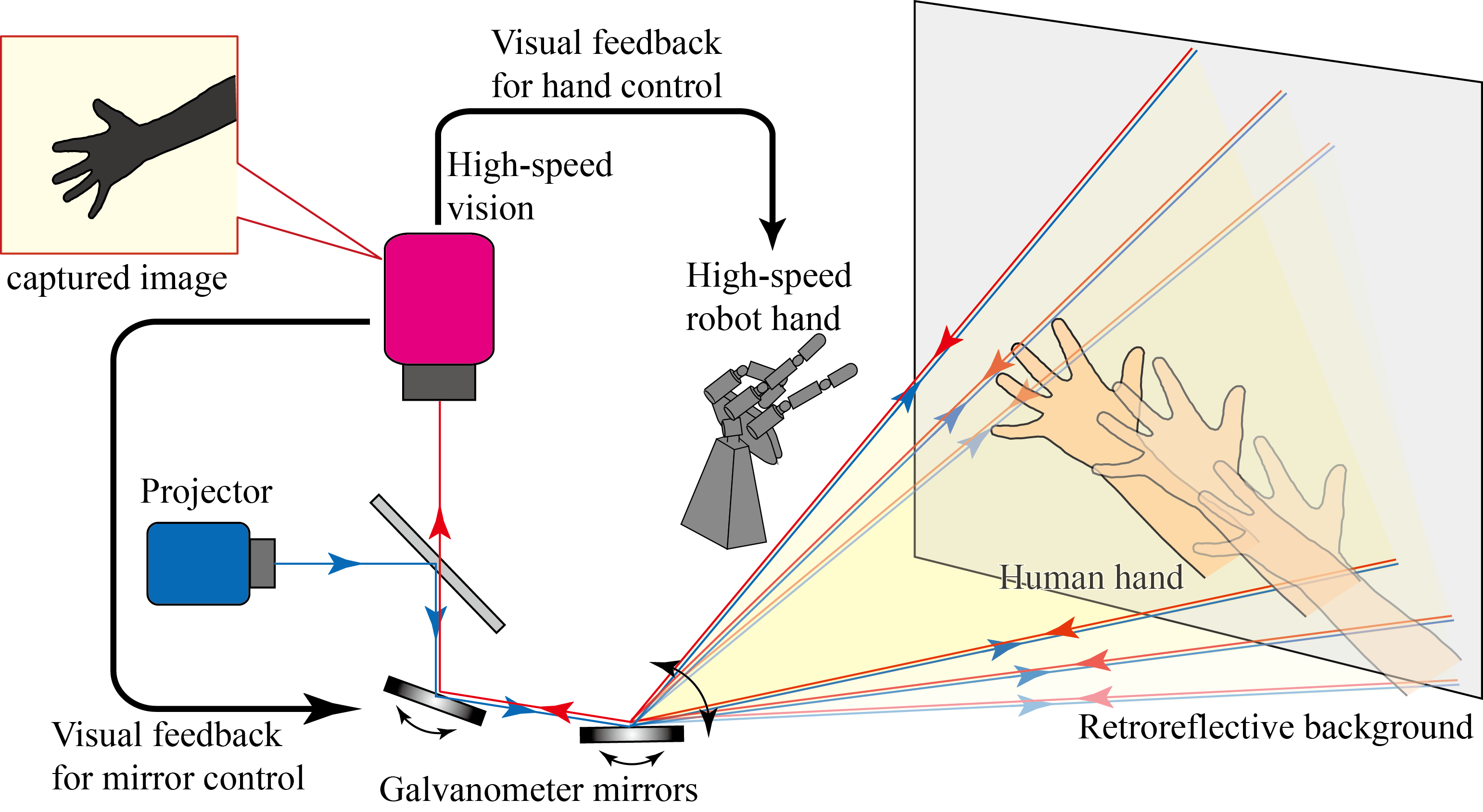
人間の手の認識は高速ビジョンを用いて1ミリ秒ごとに行っており,具体的には人間の手の位置と形状を認識している. 人間の手の位置に応じて,ロボットハンドも上下運動をするように手首関節を制御すると同時に, ポンのタイミングで人間の出した手の形状を基に,グー・チョキ・パーを認識し, 1ミリ秒後に人間に勝つ「手」をロボットハンドが出す,1ミリ秒の後出しじゃんけんを実現している. 人間の目は30fps程度であるため,今回のシステムでは後出しされている感覚はほとんどない.
本技術は,人間の動作に合わせたロボットハンドのミリ秒オーダでの協調制御の可能性を示した一例であり, 遅延なしの人間の動作支援や人間との協調作業などに応用展開されると期待できる.
また,別の視点では,人間の眼や手を必要としていた労働集約型の工程は, 自動化が困難あるいはコストが見合わないため,海外の工場立地が有利であったが, その工程を人間より高速に実現することにより,コスト面も含めて生産性を上げることが可能となる. ロボットのコストダウンが難しくなっている現在, 視覚機能も含めたロボットの高速化により,工場の立地条件を根底から変え, 日本の生産現場の空洞化に歯止めをかけることにより, 日本に工場を戻すことを目標にしている.
バージョン2
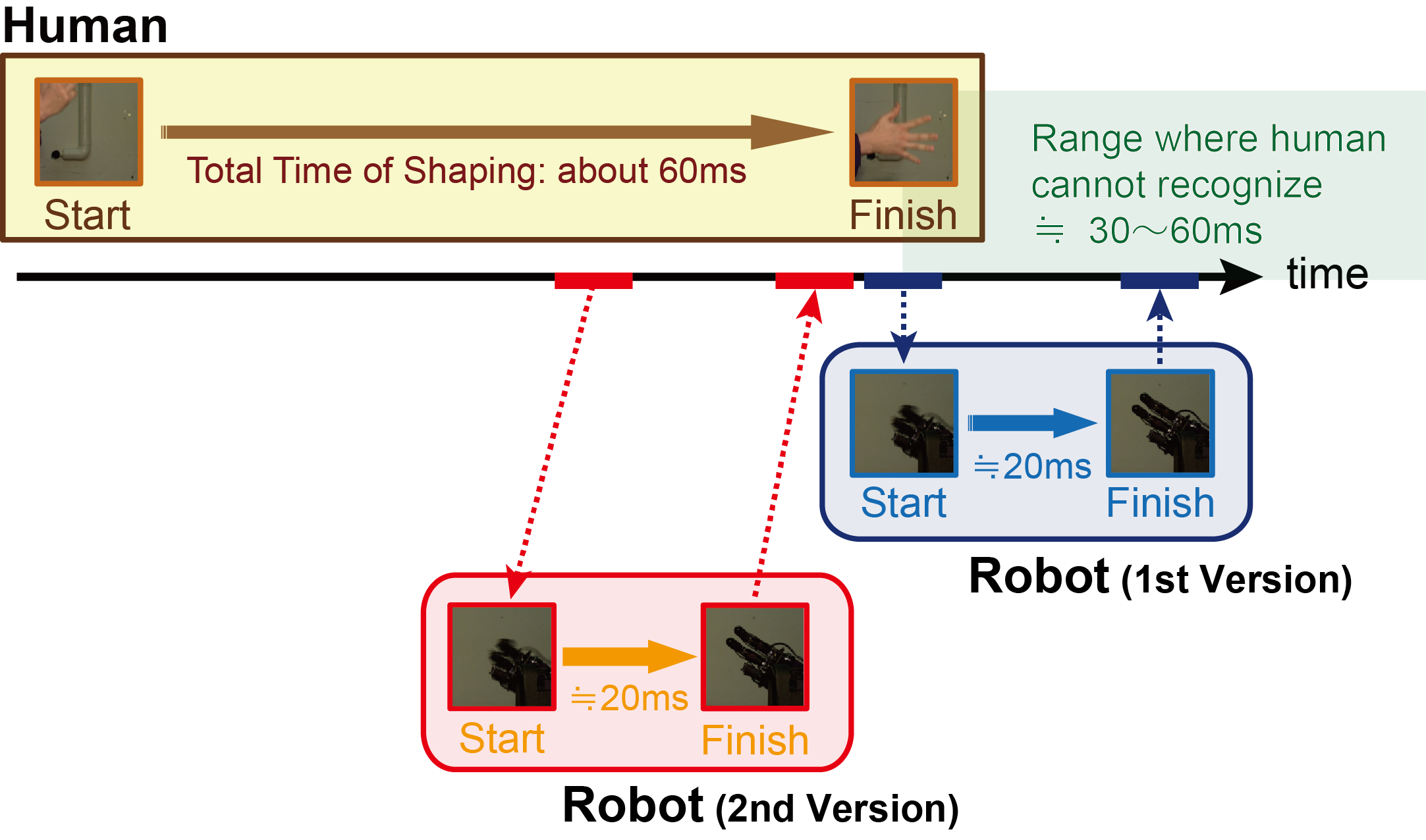
勝率100%じゃんけんロボット バージョン2を開発しました. バージョン1では,人間の「手」が完成してから, ロボットが動作し,人間の目が認識できる時間よりも早くロボットの「手」を出す, 後出しじゃんけんを実現しました. バージョン2では,人間の「手」が完成する前に認識するとともに, ロボットの「手」が出るように改良し, 先出しもしくは同時に「手」が出るじゃんけんを実現しました.
バージョン3
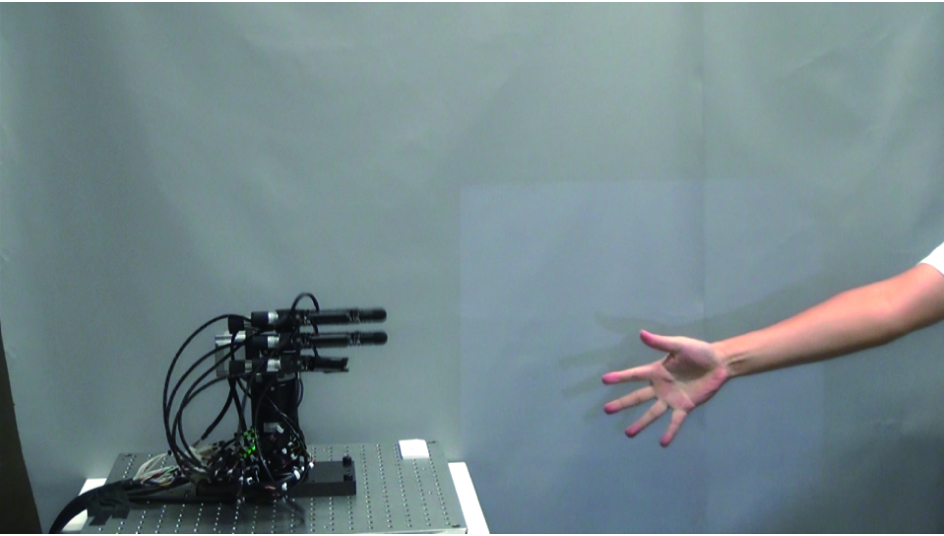
勝率100%じゃんけんロボット バージョン3を開発しました. バージョン3では,従来のじゃんけんロボットに高速トラッキング技術 (1msオートパン・チルト, るみぺん2) を導入しました. これにより,人間の手のトラッキングを可能にし,常に「手」の認識が出来るようになりました. さらに,トラッキング情報から人間の動作を認識し,その運動に合わせてロボットハンドを制御することができ, 人間の動作とロボットの動作の同期性が向上しました. 加えて,視野が拡大されたことにより,トラッキングが可能な範囲内であれば,人間はどこにでも手が出せるようになり,可動範囲を拡張しました.
ロボットの名称について
このロボットの日本語の名称は, 「じゃんけんロボット」です.「じゃんけん」はひらがなで, 「ロボット」はカタカナです.また, 英語の名称は, 「Janken (rock-paper-scissors) robot」で, 省略形は, 「Janken robot」です.
日本テレビ放送網株式会社の番組「Oha!4 NEWS LIVE」(平成24年7月5日放送分)の放送内容について
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
動画の原本もございます.使用許諾は,contactまでご連絡下さい.