


High Speed Bipedal Robot Running Using High Speed Visual Feedback
| With the goal of pursuing the limit of the machine system beyond the human being by improving both hardware and control method, we developed an entirely new bipedal running robot system "ACHIRES" (Actively Coordinated High-speed Image-processing Running Experiment System) using the high-speed visual feedback, and we have realized a high speed running as the first step of this research. |
 Summary
Summary
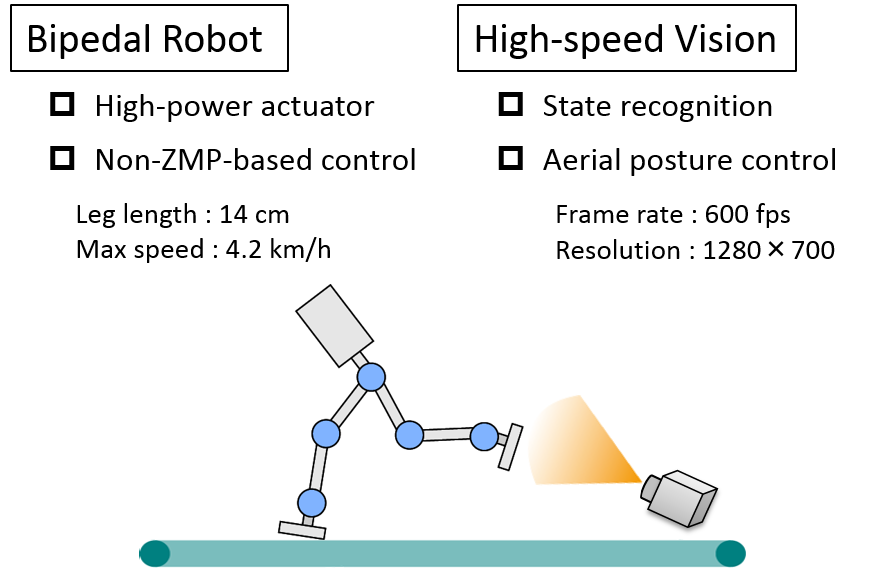
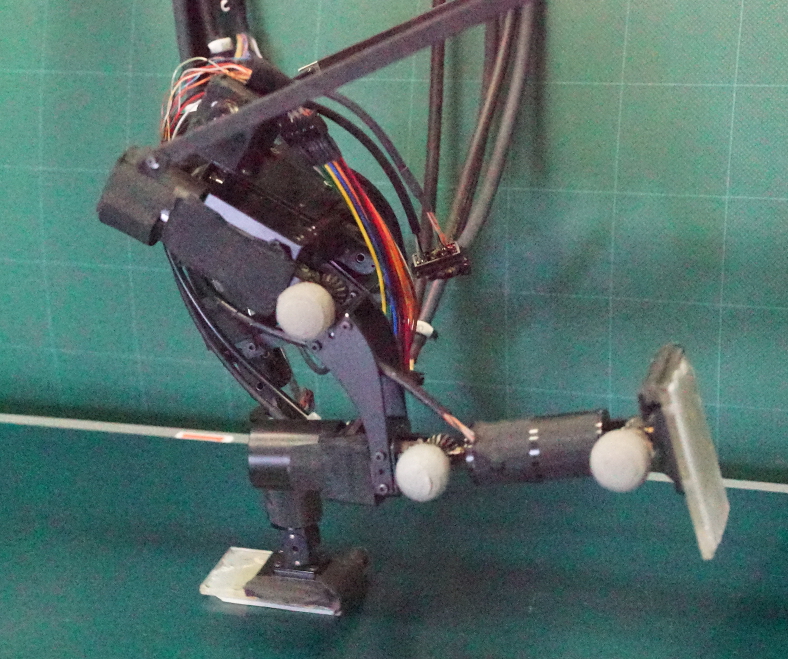
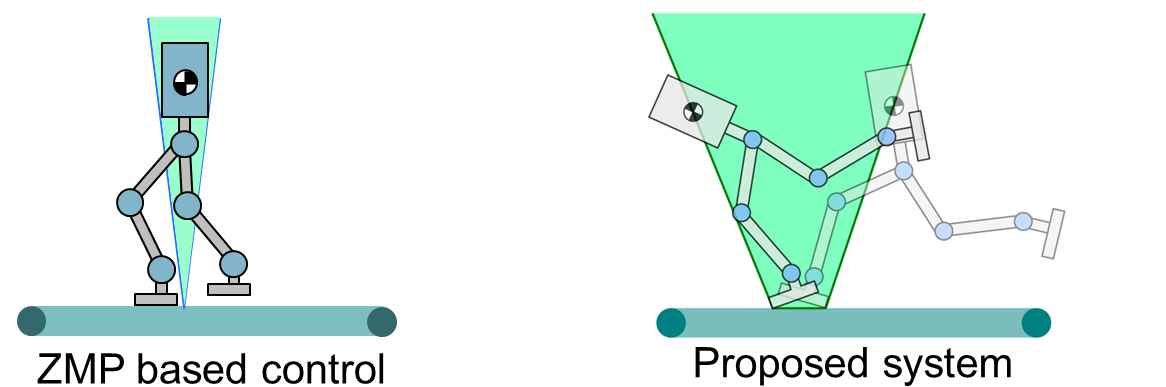
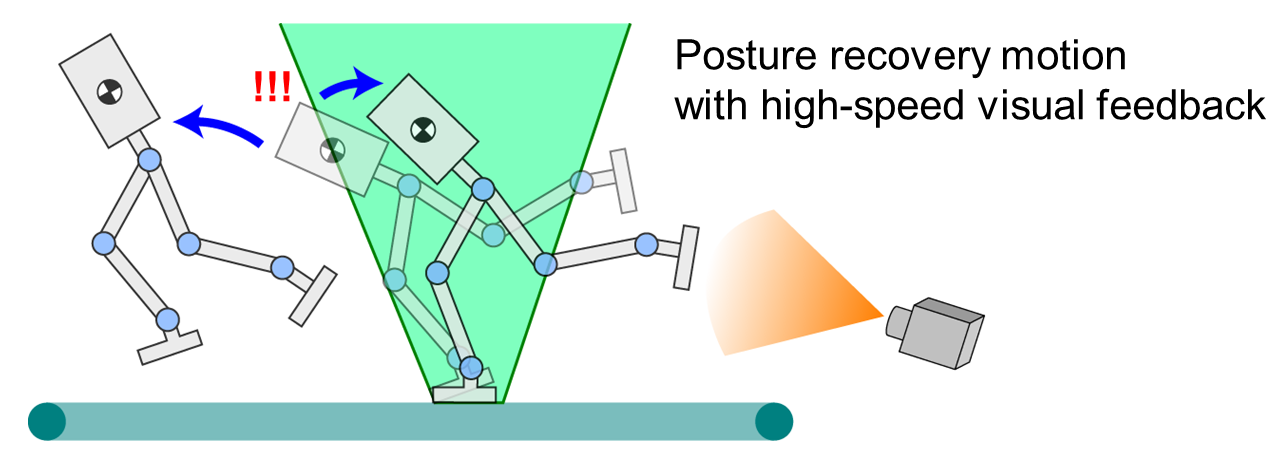
ACHIRES is composed of high-speed vision and high-speed actuators to achieve instantaneous recognition and behavior. The similar technologies are used in our Janken (Rock Paper Scissors) Robot. High-speed vision detects the state of the biped robot including the timing of landing at 600 fps. The biped mechanism with the leg length of 14 cm is set to run in the sagittal plane. At present, the running velocity reaches 4.2 km/h. Simple control based on high-speed performance of sensory-motor system enables the biped robot to stably run without falling, unlike computationally expensive ZMP-based control which is commonly used for balance. The aerial posture is recovered to compensate for the deviation from the stable trajectory using high-speed visual feedback.
We also address a task of somersaulting. While running, the robot takes a big swing with one foot and jumps. After takeoff, both legs are controlled to curl up for high-speed rotation in the air. ACHIRES is going to be improved to push the envelope while demonstrating various biped locomotion tasks.
 |
 |
 |
 |
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
Reference
- Tomoki Tamada, Wataru Ikarashi, Daiki Yoneyama, Kazuhito Tanaka, Yuji Yamakawa, Taku Senoo and Masatoshi Ishikawa: High-speed Bipedal Robot Running Using High-speed Visual Feedback, 2014 IEEE/RAS International Conference on Humanoid Robots, (Madrid, Spain, 2014.11.19) / Proceedings, pp.140-145 (2014)