


ホーム >
ダイナミック ビジョン システム > ゾウリムシの非ホロノミック性と軌道計画
ゾウリムシの非ホロノミック性と軌道計画
概要
微生物は進化の過程で高性能なセンサとアクチュエータを体内に獲得してきた. 我々は微生物を高機能マイクロマシンとみなして制御することを目指している.
微生物マイクロマシン応用においてアクチュエーション技術の確立は最重要課題であり, これまでゾウリムシに対し電気走性を利用したごく単純な運動制御が行われているが, これらは経験則に基づいた制御のため,制御性能に限界があった.これに対し, ゾウリムシをロボティクスの枠組から議論すればより高度な制御が可能になると考えられる. このための最低限の準備として, まずゾウリムシの物理的なダイナミクスモデルを構築した.
このモデルを簡略化することにより,ゾウリムシが二輪車によく似た非ホロノミック拘束系であること, 大域的に可制御であることを示した.この結果により, ロボティクス分野において確立された既存の非ホロノミック系の軌道計画手法がゾウリムシに適用できる可能性がひらかれた.
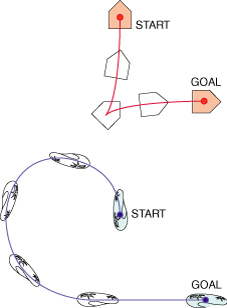
さらに,このモデルに Lyapunov ライクな手法を適用して, 切り返し等による尖点をなくした軌道計画および運動制御手法を提案し, 任意の地点から目標地点に向かって安定に軌道が収束することを数値実験により検証した.
参考文献
- Naoko Ogawa, Hiromasa Oku, Koichi Hashimoto and Masatoshi Ishikawa : Trajectory Planning of Motile Cell for Microrobotic Applications, Journal of Robotics and Mechatronics, Vol.19, No.2, pp.190-197 (2007.4) [abstract]
- 尾川順子,奥寛雅,橋本浩一,石川正俊:マイクロロボット応用のための微生物の軌道計画, 日本機械学会ロボティクス・メカトロニクス講演会2006(ROBOMEC2006) (東京, 2006.5.28)/講演論文集,2P1-A26 [PDF (118K)]
- 尾川順子,奥寛雅,橋本浩一,石川正俊:電気走性アクチュエーションにおけるゾウリムシの非ホロノミック性, 第23回日本ロボット学会学術講演会 (横浜, 2005.9.17)/予稿集, 3F14 (日本ロボット学会学術奨励賞) [PDF (598K)]