


Nonholonomic Properties in Paramecium Galvanotaxis and Path Planning of Paramecium Cells
Summary
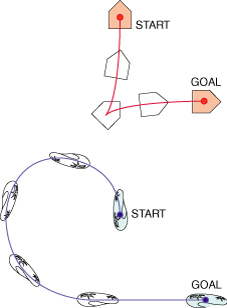
Our goal is to utilize microorganisms as micro-robots by using galvanotaxis (locomotor response to electrical stimulus). Previous studies were based on simple empirical rules without consideration of the dynamics of the cells, and thus had limited control performance. To achieve more precise control as microrobots, it is essential to deal with Paramecium cells in the framework of standard robotics methodologies. This paper is the first attempt to derive a control law of Paramecium cells under an electric field from a dynamics model for microrobotic applications. Simplification of the dynamics model reveals that a Paramecium cell in an electric field is a nonholonomic system. Based on the simplified model, we derive a control law for cells using a common Lyapunov-like method for nonholonomic systems and generate cusp-free trajectories. Numerical experiments demonstrate successful static convergence of the cell trajectories to the desired position and attitude.
References
- Naoko Ogawa, Hiromasa Oku, Koichi Hashimoto and Masatoshi Ishikawa. Trajectory Planning of Motile Cell for Microrobotic Applications. Journal of Robotics and Mechatronics, Vol.19, No.2, pp.190-197, Apr. 2007. [abstract]
- Naoko Ogawa, Hiromasa Oku, Koichi Hashimoto and Masatoshi Ishikawa. Nonholonomy of Paramecium Cell in Galvanotactic Actuation. The 23rd Annual Conference of the Robotics Society of Japan (Yokohama, Japan, 19 Sep 2005) / Proceedings, 3F14, Sept. 2005. (in Japanese) [PDF (598K)]
Corresponding author: Naoko Ogawa (Naoko_Ogawa )
)