


微生物のセンシング情報の可視化
概要
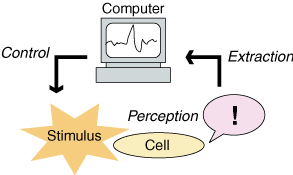
これまでに提案されてきたマイクロセンサーと比べて微生物の持つ知覚は優れた点を多く持つ. そのような微生物が体内に持つ洗練された知覚能力を利用することが出来れば大きなメリットがあると考えられる. 下図に示されるように,PCを用いて微生物から知覚情報の抽出や解析 またそれらの情報を基に微生物に対しフィードバックをかけることは, これまでにない生物模倣型センサーの実現に向けた大きな一歩になる. また,筆者らが行ってきた微生物の運動制御と相まって, 微生物をマイクロロボットとして利用することへの期待も高まる.
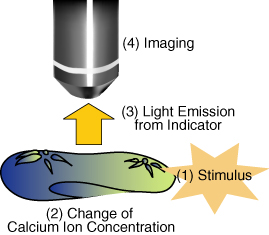
本研究では対象として単細胞原生生物の一種である Paramecium caudatum(ゾウリムシ)を取り上げる. Paramecium は筆者らが微生物のマイクロロボット応用へ向けた研究を行ってきた際の対象でもある. Paramecium は障害物等との接触刺激を感じると 障害物を避けるように逆向きに遊泳する性質を持ち,この過程において細胞内のカルシウムイオン濃度が上昇することが知られている. 言い換えると,接触したという情報がカルシウムを用いた信号に変換されていると言える. もしこの機械受容信号を抽出し解析することが出来れば,細胞が何を知覚したのかを知ることが出来る. 機械受容信号の抽出には信号を可視化する手法が有効と考えられ, カルシウムに反応する指示薬等を用いれば 細胞内におけるカルシウム濃度を下図のように可視化することが出来る.
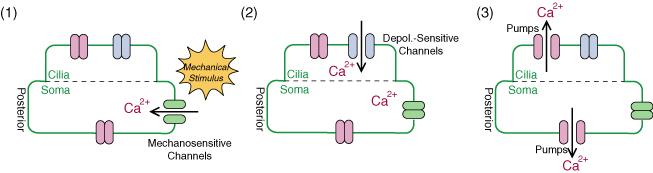
Paramecium の接触刺激に対するカルシウム濃度の変化は 下図のようにイオンチャネルを通したカルシウムイオンの移動で説明される. マイクロ・インジェクションで細胞内にカルシウム指示薬を注入することで, カルシウムイオンによる信号伝達を視覚化し Paramecium が接触刺激を受けた瞬間の推定を行った.
結果
指示薬による蛍光発光を撮影した画像を以下に示す. 刺激が与えられるとカルシウム濃度が急激に増大した後にゆっくりと減衰していくのが分かる.
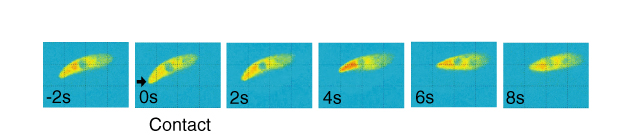
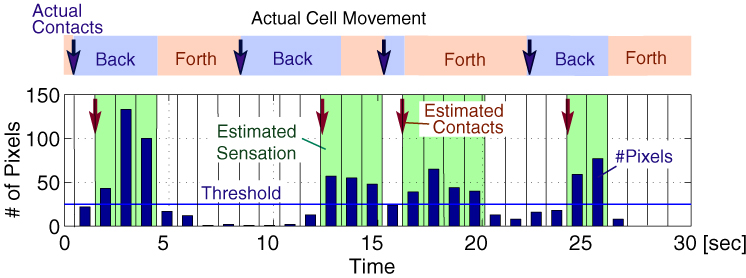
蛍光物質の画像輝度から細胞の先端が接触を起こしたかどうかの情報を得ることが出来る. カルシウム濃度の情報を用い細胞が接触を知覚したかどうか,またその時刻を推定した. 推定はオフラインで MATLAB を用いて行った. その結果30秒間におこった4回の接触を数秒の遅れがあるものの全て推定することに成功した.
参考文献
- Anchelee Davies, Naoko Ogawa, Hiromasa Oku, Koichi Hashimoto and Masatoshi Ishikawa : Visualization and Estimation of Contact Stimuli using Living Microorganisms, 2006 IEEE International Conference on Robotics and Biomimetics(ROBIO 2006) (Kunming, 2006.12.18)/Proceedings, pp.445-450 (2006.12) (Best Paper in Biomimetics) [PDF (317K)] *IEEE