


ホーム >
センサ フュージョン >
ワンボード・USB給電タイプの高速・高精度近接覚センサ
ワンボード・USB給電タイプの高速・高精度近接覚センサ
概要
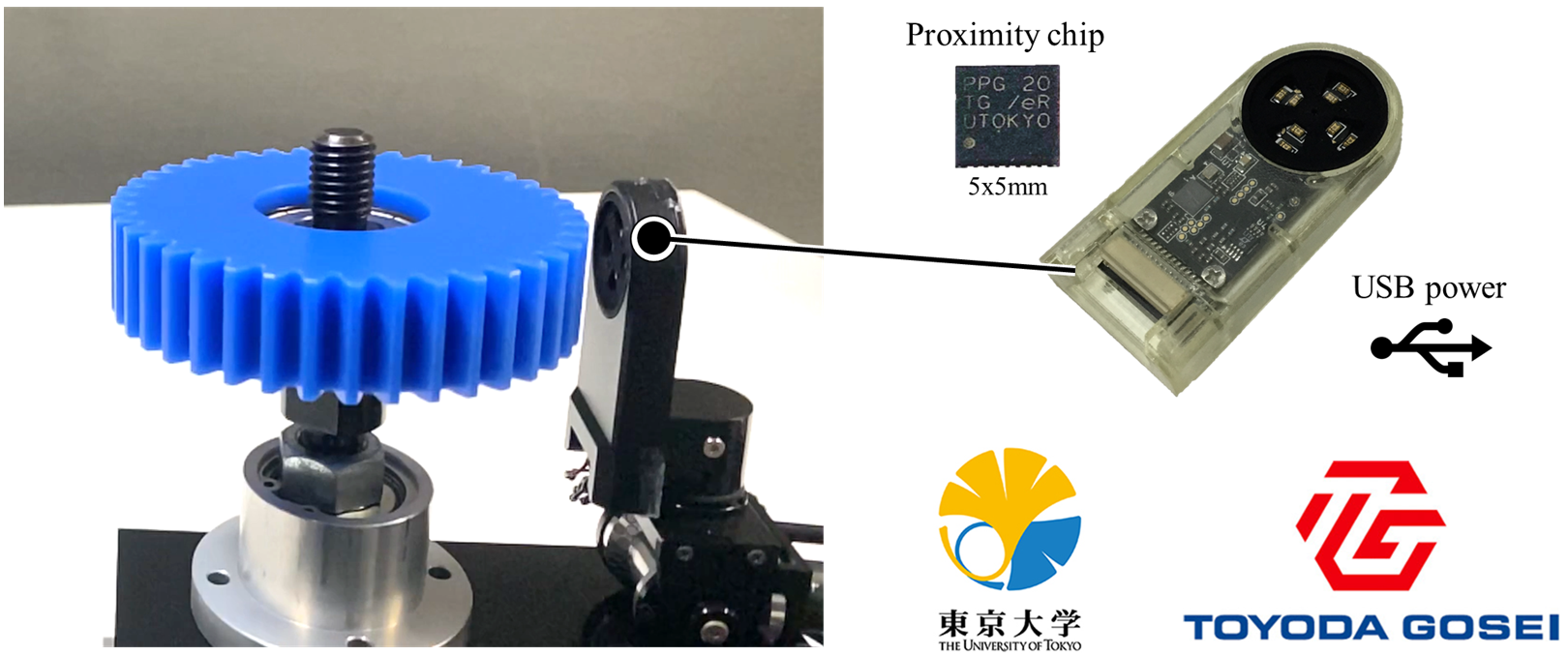
単一基板,単電源で高速・高精度計測が可能な近接覚センサを開発しました(Fig.1).
距離検出の範囲は0∼30mm,傾き角度は-45∼+45°であり,USB給電で1ms周期での計測が可能です.
近距離での有効分解能は従来[1]の1.6 倍の高分解能(<26.7μm)を実現しました.
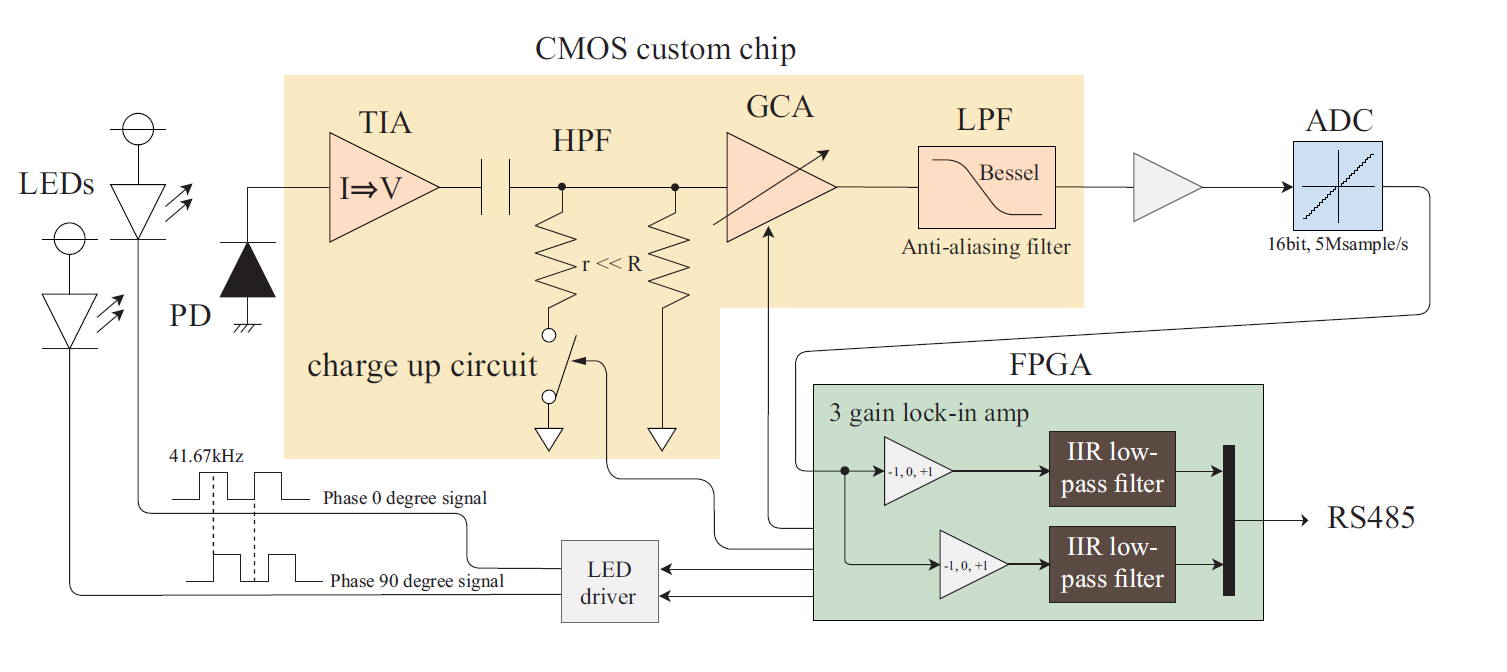
Fig. 2は開発したセンサの回路ブロック図です.
以前に開発した特殊な光学式三角測量センサの回路構成[1]をベースに,
初段のアンプ回路を0.18μm COMS プロセスでカスタムIC 化しました.
更に,後段の信号処理回路をデジタルフィルタ化することで計測精度を向上させつつ薄型化しました.
このセンサをロボットハンド指先に搭載することで,高速に指先位置を調整可能になります. この動作は例えば協働ロボットアームのダイレクトティーチング後の手先位置誤差の修正や, カメラの推定誤差の修正に利用できます.また物体表面の形状を高精度にスキャンすることも可能です.
上記の研究成果は,東京大学石川グループ研究室と豊田合成株式会社との共同研究です.
|
|
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- Keisuke Koyama, Makoto Shimojo, Taku Senoo, and Masatoshi Ishikawa: High-Speed High-Precision Proximity Sensor for Detection of Tilt, Distance, and Contact, IEEE Robotics and Automation Letters, Vol.3, No.4, pp.3224-3231 (2018)
- 小山佳祐,堀邊隆介,安田博,万偉偉,原田研介,石川正俊:ワンボード・USB給電タイプの高速・高精度近接覚センサの開発とプリグラスプ制御の解析,第38回日本ロボット学会学術講演会,1G2-04 (2020)