


ホーム >
センサ フュージョン >
高速・高精度近接覚センサを用いた紙風船キャッチ
高速・高精度近接覚センサを用いた紙風船キャッチ
概要
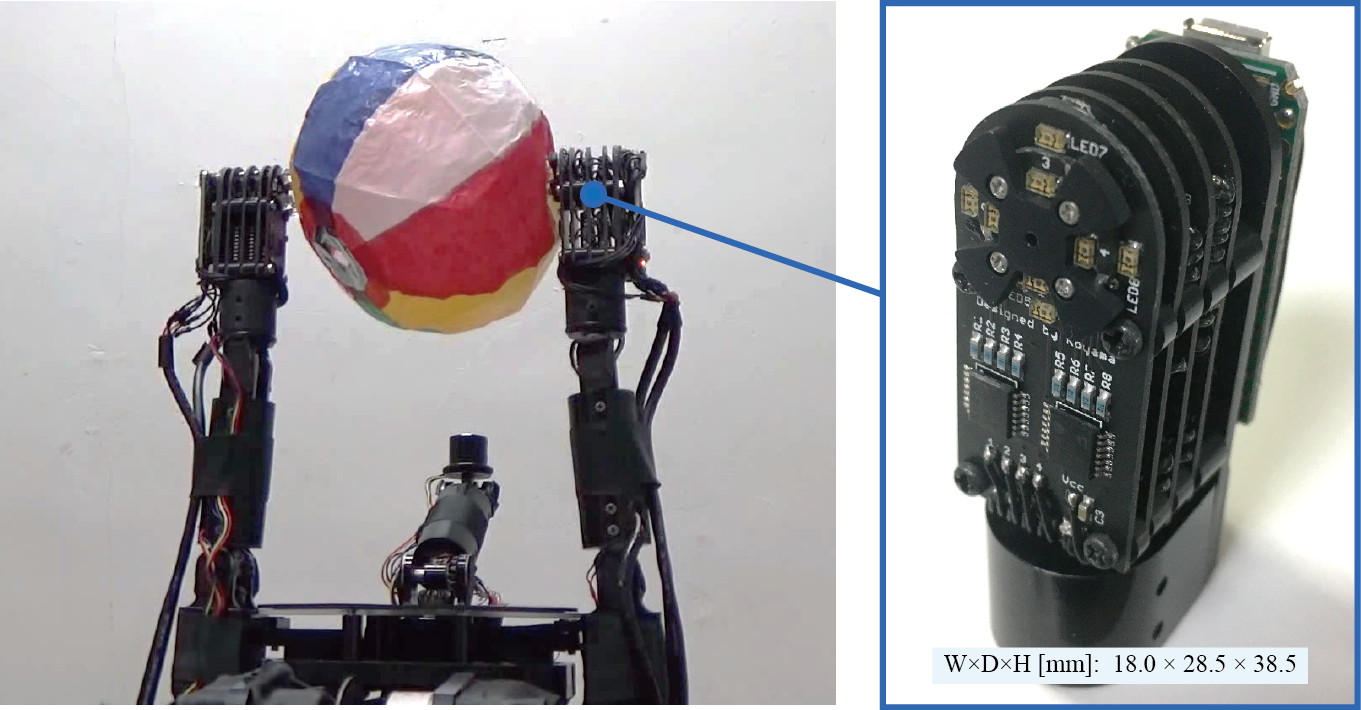
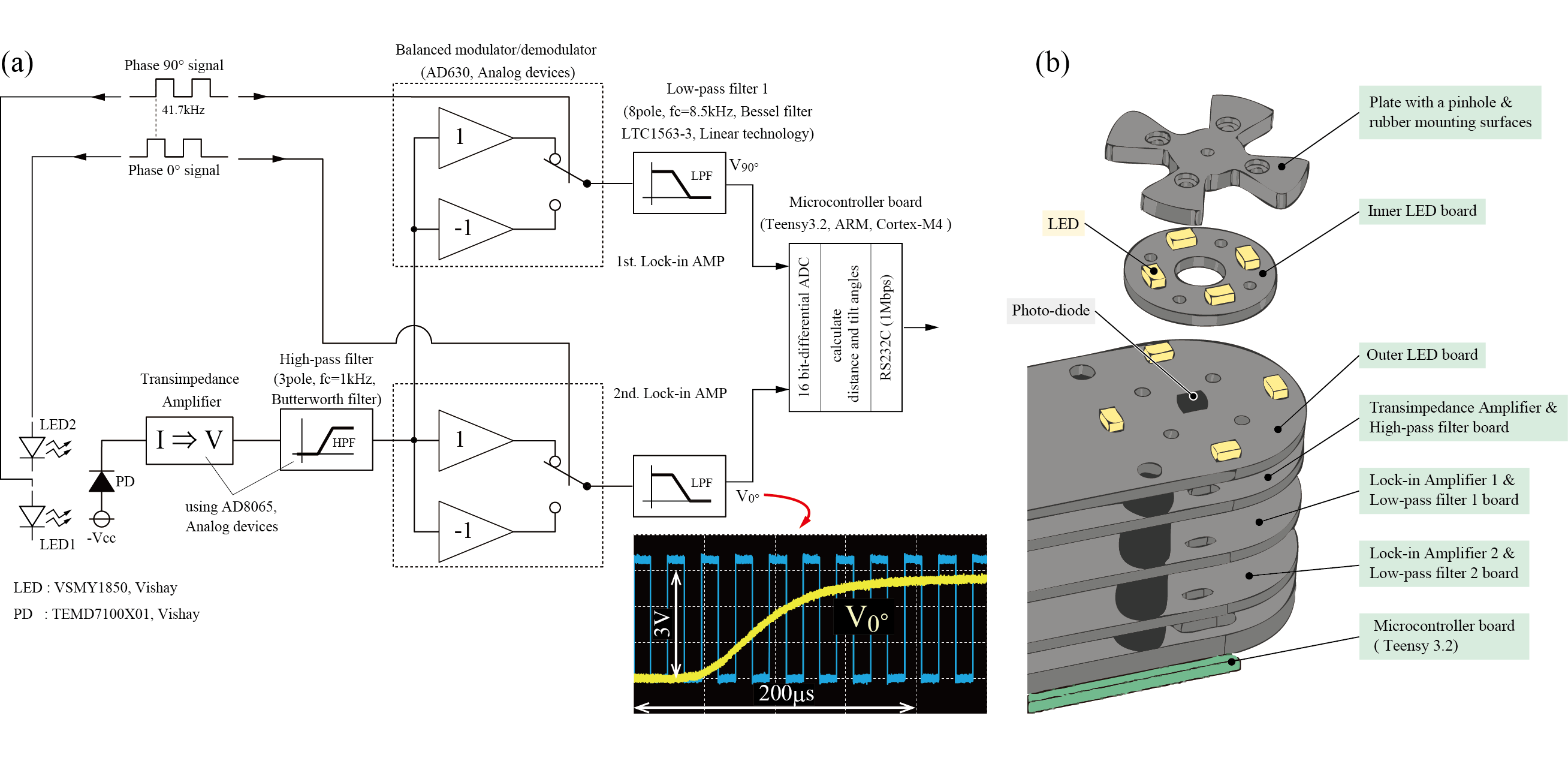
従来よりも高速かつソフトタッチなキャッチ動作を実現するために,指先サイズの高性能近接覚センサを開発しました. 本センサは物体の色や明るさ(光の反射率)によらず距離と傾きを検出します.計測時間は従来の測距センサの1/10以下(<1ms)であり, 近距離における距離計測のばらつきは1/129以下(<31μm, peak-to-peak)です. 検出原理は過去に提案された方式 (増田,長谷川,佐々,1981)を使用していますが, 我々はこの原理に適したアンプ回路を導入し,検出素子の光学設計を最適化することで小型化,高速・高精度化を達成しました. 本センサにより,非接触での距離・傾きと接触を高感度に検出する"超触覚センシング"が可能となり, 落下する紙風船を潰さずにキャッチすることに成功しました.
本研究は物体位置や姿勢,形状の誤差,柔らかさの違いに応じた自律的かつ高速な把持・操作を目指す研究であり, 柔軟物と剛体の両方を取り扱う生産ラインやホームサービスロボットなど,様々なロボット分野への応用が考えられます. 今後は高速ビジョンセンサと近接覚センサの1msセンサフュージョンにより,より高速性と精密性が求められるキャッチ動作の実現を目指します.
|
|
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- Keisuke Koyama, Makoto Shimojo, Taku Senoo, and Masatoshi Ishikawa: High-Speed High-Precision Proximity Sensor for Detection of Tilt, Distance, and Contact, IEEE Robotics and Automation Letters, Vol.3, No.4, pp.3224-3231 (2018)
- 小山 佳祐,下条 誠,妹尾 拓,石川 正俊,:触覚機能を内包する高速・高精度近接覚センサ-第1報:センサモジュールの開発と接触判定の実現-, 日本機械学会ロボティクスメカトロニクス講演会2018 (Robomech 2018) (北九州,2018.6.4) / 講演会論文集,1P1-H13