


One board, USB Type High-speed, High-precision Proximity Sensor
Summary
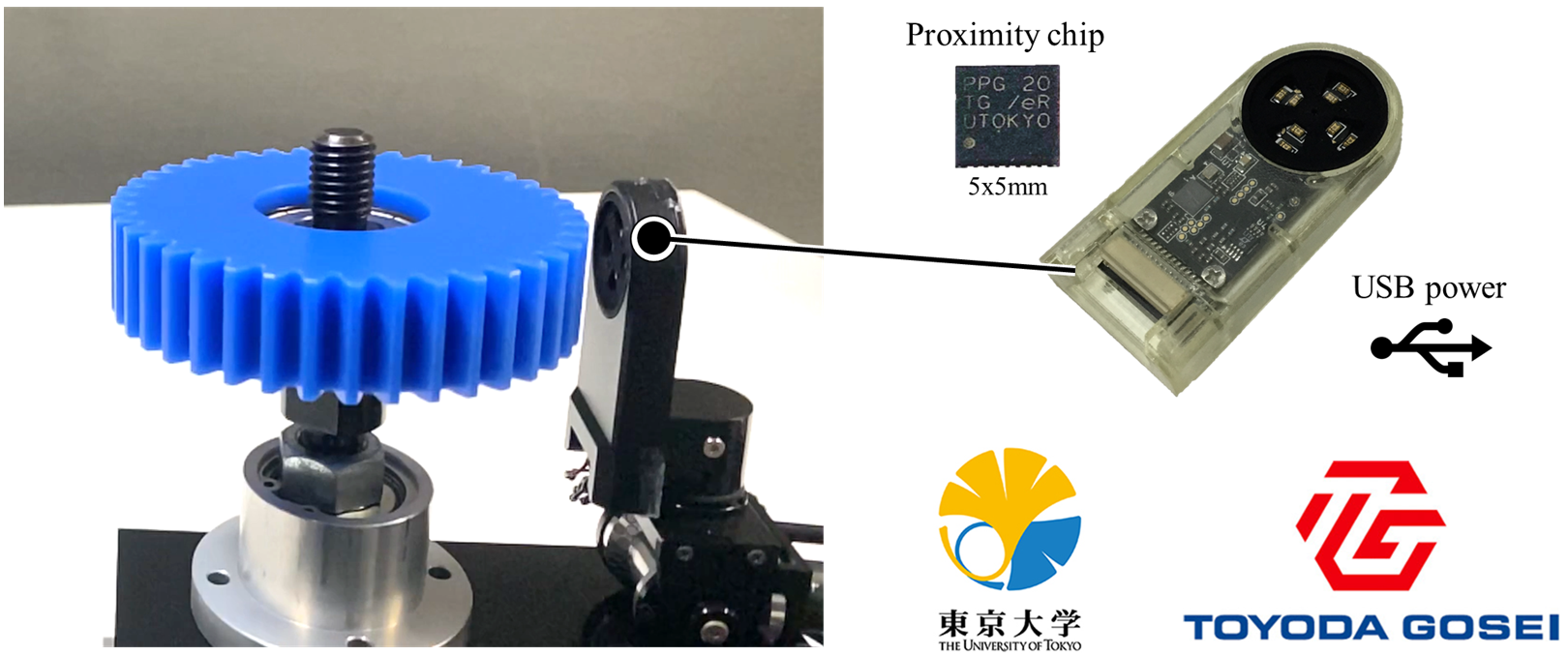
We have developed a proximity sensor that enables high-speed, high-precision measurement with a single board and a single power supply (Fig. 1).
The range of distance detection is 0 to 30 mm, the tilt angle is -45 to + 45 °, and measurement period is 1 ms with USB power supply.
The distance resolution at short distances is 1.6 times higher (<26.7 μm) than the previous sensor [1].
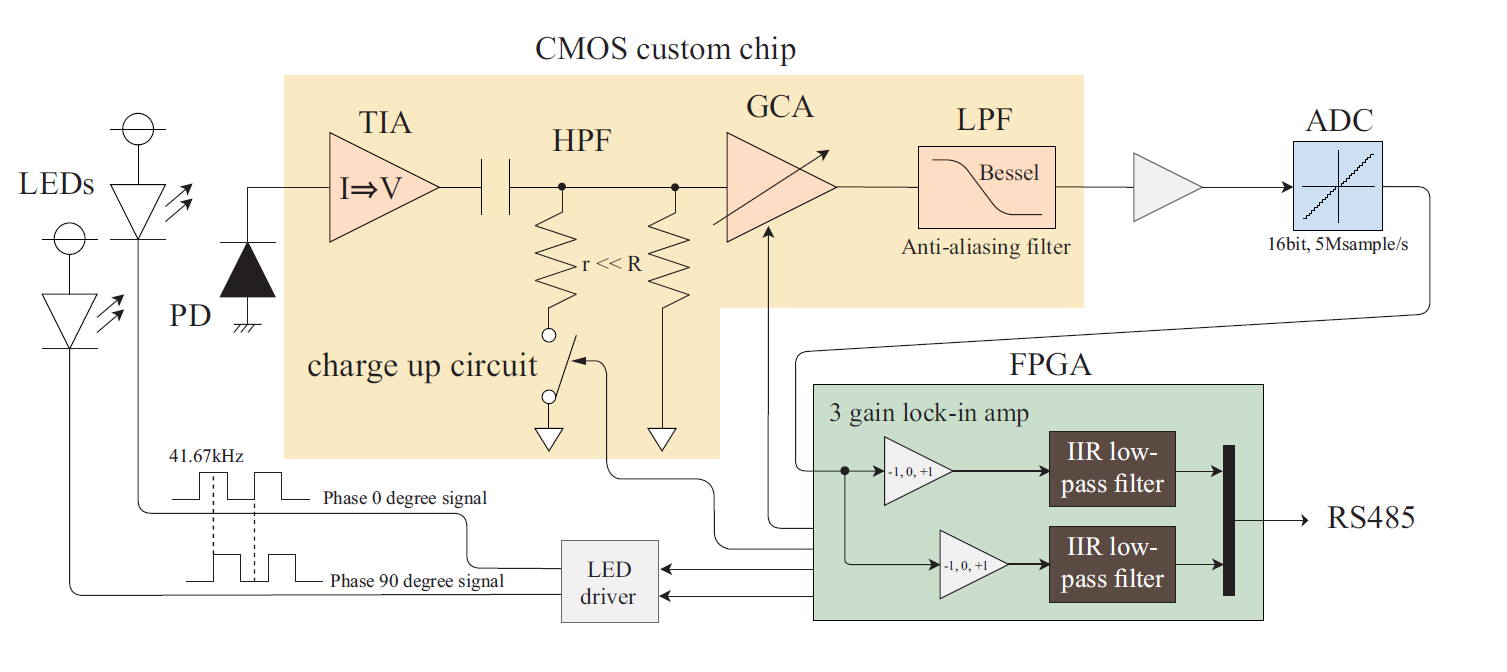
Fig. 2 is a circuit block diagram of the developed sensor.
Based on the circuit configuration of the special optical triangulation sensor
developed in the past [1], amplifier circuit (the first stage) was made into a custom IC by the 0.18 μm COMS process.
Furthermore, by replacing the analog circuit (latter stage) with a digital filter, the measurement accuracy is improved and the size of sensor is reduced.
When this sensor is mounted on the fingertips of a robot hand, the fingertip position can be adjusted at high speed. For example, it can be used to correct the hand position error after direct teaching of the collaborative robot arm and to correct the camera estimation error. It is also possible to scan the shape of an object surface with high accuracy.
This work was conducted by a joint research project between Ishikawa Group Laboratory and Toyoda Gosei co., ltd.
|
|
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
Reference
- Keisuke Koyama, Makoto Shimojo, Taku Senoo, and Masatoshi Ishikawa: High-Speed High-Precision Proximity Sensor for Detection of Tilt, Distance, and Contact, IEEE Robotics and Automation Letters, Vol.3, No.4, pp.3224-3231 (2018)
- Keisuke Koyama, Ryusuke Horibe, Hiroshi Yasuda, WeiWei Wan, Kensuke Harada, Masatoshi Ishikawa: Development of One Board, USB Type High-Speed, High-Precision Proximity Sensor and Analysis of Pre-grasp Control, Robotics Society of Japan Conference (RSJ2020) / proceedings, 1G2-04 (2020) (in Japanese)