


非対称トルクに基づく二足ロボットの空中転回
概要
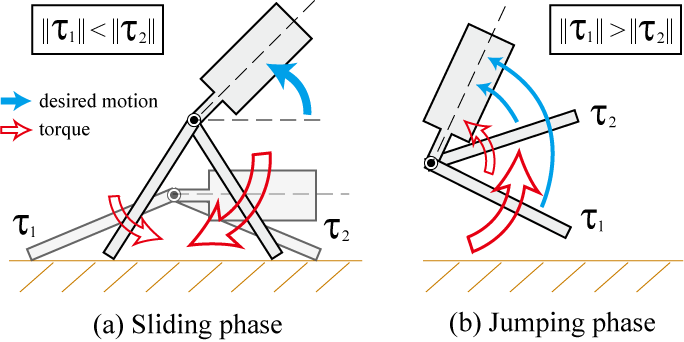
ダイナミックな脚運動の実現に向けて, 二足ロボットの空中転回動作について解析した. 両脚の動作を非対称に設定することで, 接地期における角運動量の増加と滞空期における慣性モーメントの最小化をおこなう戦略を提案した. シミュレーションでは, 将来的に実機で実験することを想定し, 滑り走行の値を参考にしてパラメータを設定した. 今回は2自由度のメカニズムを用いたため, 接地期では滑り動作をおこなっている. 非対称トルクにより, 跳躍高さを変えずに必要トルクを減少させる効率的な動作生成が可能であることを確認し, 体幹を一回転させることを達成した.
動画
参考文献
- Taku Senoo and Masatoshi Ishikawa. Two-Dimensional Analysis of Dynamic Biped Locomotion Based on Feet Slip. 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. (Wollongong, Australia, 2013.7.10) / Proceedings, pp.512-517.
- 妹尾拓, 石川正俊: 動的2脚移動における状態遷移の2次元解析, 第31回日本ロボット学会学術講演会 (東京, 2013.9.4) / 講演論文集, 1K3-08.