


滑り摩擦非対称性を利用した動的2脚移動
概要
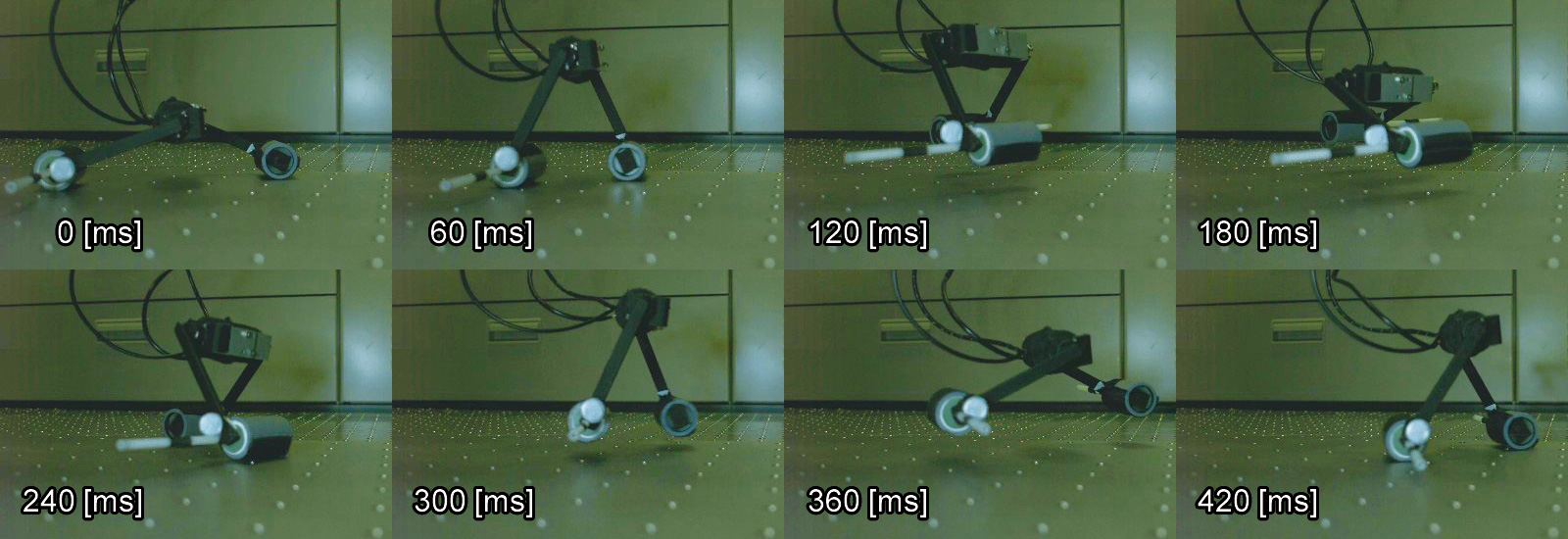
脚移動の推進力として, 並進滑りを用いた移動手法を提案した. この手法は, 滑り動作と跳躍動作の高速な切り替えによって, ダイナミックな2脚移動が可能である. 足裏には, 滑り摩擦係数の異なる2種類の材料を取り付けることで, 連続的な前進運動を実現している. 数値シミュレーションをおこない, 跳躍高さや移動周期は摩擦特性にほとんど影響されないのに対して, 水平速度は摩擦特性に大きく依存することを導出した. 高速ビジョンを着地判定に用いた移動実験をおこない, 提案手法の有効性を実証した.
動画
参考文献
- 妹尾拓, 高野光浩, 石川正俊: 滑り摩擦非対称性を利用した動的2脚移動, 日本ロボット学会誌, Vol.31, No.3, pp.301-309, 2013.
- 妹尾拓, 高野光浩, 石川正俊: 非対称摩擦による二足ロボットの並進滑り移動, 第18回 ロボティクスシンポジア (上山, 2013.3.15) / 講演論文集, pp.561-566.
- Taku Senoo, Mitsuhiro Takano and Masatoshi Ishikawa: Dynamic Horizontal Movement of a Bipedal Robot Using Frictional Asymmetry. 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. (Vilamoura, Portugal, 2012.10.9) / Proceedings, pp.1834-1839.
- 高野光浩, 妹尾拓, 石川正俊: 摩擦非対称性を利用した脚ロボットの跳躍移動, 日本機械学会ロボティクスメカトロニクス部門講演会2012 (浜松, 2012.5.29) / 講演論文集, 2A1-T02.