


Home >
Sensor Fusion >
Somersault Based on Sliding Motion Using Torque Asymmetry
Somersault Based on Sliding Motion Using Torque Asymmetry
Research
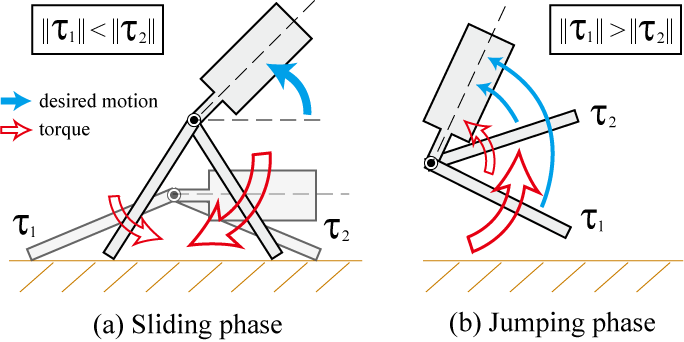
In this research, biped somersault is considered with the goal of achieving high-speed dynamic locomotion. We propose a motion strategy using torque asymmetry to increase angular momentum and minimize the moment of inertia for realizing high-speed rotation. The movement consists of a sliding motion based on kinematic constraints and a jumping motion controlled to reduce energy requirement. The strategy is suitable for actual experiments from the viewpoint of simple and energy-efficient control. Simulation results are shown in which a 2-DOF biped robot makes one revolution in the air.
Movie
Reference
- Taku Senoo and Masatoshi Ishikawa. Two-Dimensional Analysis of Dynamic Biped Locomotion Based on Feet Slip. 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. (Wollongong, Australia, 2013.7.10) / Proceedings, pp.512-517.