


スキル統合に基づく結び目の生成
概要
高速多指ハンドを用いた柔軟紐の片手結びにおいて, 止め結びと呼ばれる結び目を実現している. この結び目は, 3つのスキルである①輪の作成, ②紐の入替, ③紐の引抜を組み合わせることにより実現され, これらのスキルのロバスト性を向上させるために高速視触覚フィードバック制御手法を提案している.
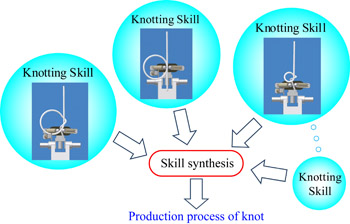
しかしながら, 結び目生成に関する一般的な議論は行われていなかった. そこで, 本研究では, 結び目を実現するために最小限必要なスキルを人間の結び動作を基に抽出し, 抽出されたスキルを統合することにより様々な結び目の生成が可能であることを示している.
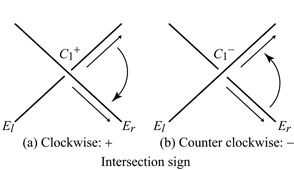
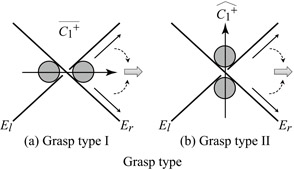
結び目の記述として, 結び目を構成している交点に着目し, 交点の記述を以下の法則に従って記述している.
止め結びとひと結びの生成方法を以下に示す.

|

|
動画
参考文献
- 山川雄司,並木明夫,石川正俊,下条誠: スキル統合に基づく結び操作と多指ハンドによる実現, ロボティクス・メカトロニクス講演会2008/1P1-A09 (2008)
- Y. Yamakawa, A. Namiki, M. Ishikawa and M. Shimojo: Knotting Manipulation of a Flexible Rope by a Multifingered Hand System based on Skill Synthesis, 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems/pp. 2691/2696 (2008)
- 山川雄司,並木明夫,石川正俊,下条誠: 多指ハンドによる結び操作実現を目指したスキル統合, 第9回 計測自動制御学会 システムインテグレーション部門講演会/pp. 329/330 (2008)
- 山川雄司,並木明夫,石川正俊,下条誠: 多指ハンドの動作を考慮したスキル統合に基づく結び操作, 第14回 ロボティクスシンポジア/pp. 331/336 (2009)