


ホーム >
センサ フュージョン > 高速多指ハンドを用いた柔軟紐の片手結び
高速多指ハンドを用いた柔軟紐の片手結び
概要
これまでに本研究室では, 高速多指ハンドと高速な応答性を持つセンサシステムにより様々なタスクを実現してきた. しかし,それらのタスクは対象物体が剛体と仮定できるものであった.今後, ロボットハンドの開発を行う上で,器用さという点も重要になる. 以上の点を考慮して本研究では, 柔軟線状物体の操りの一例として多指ハンドによる柔軟紐の片手結びを行っている.
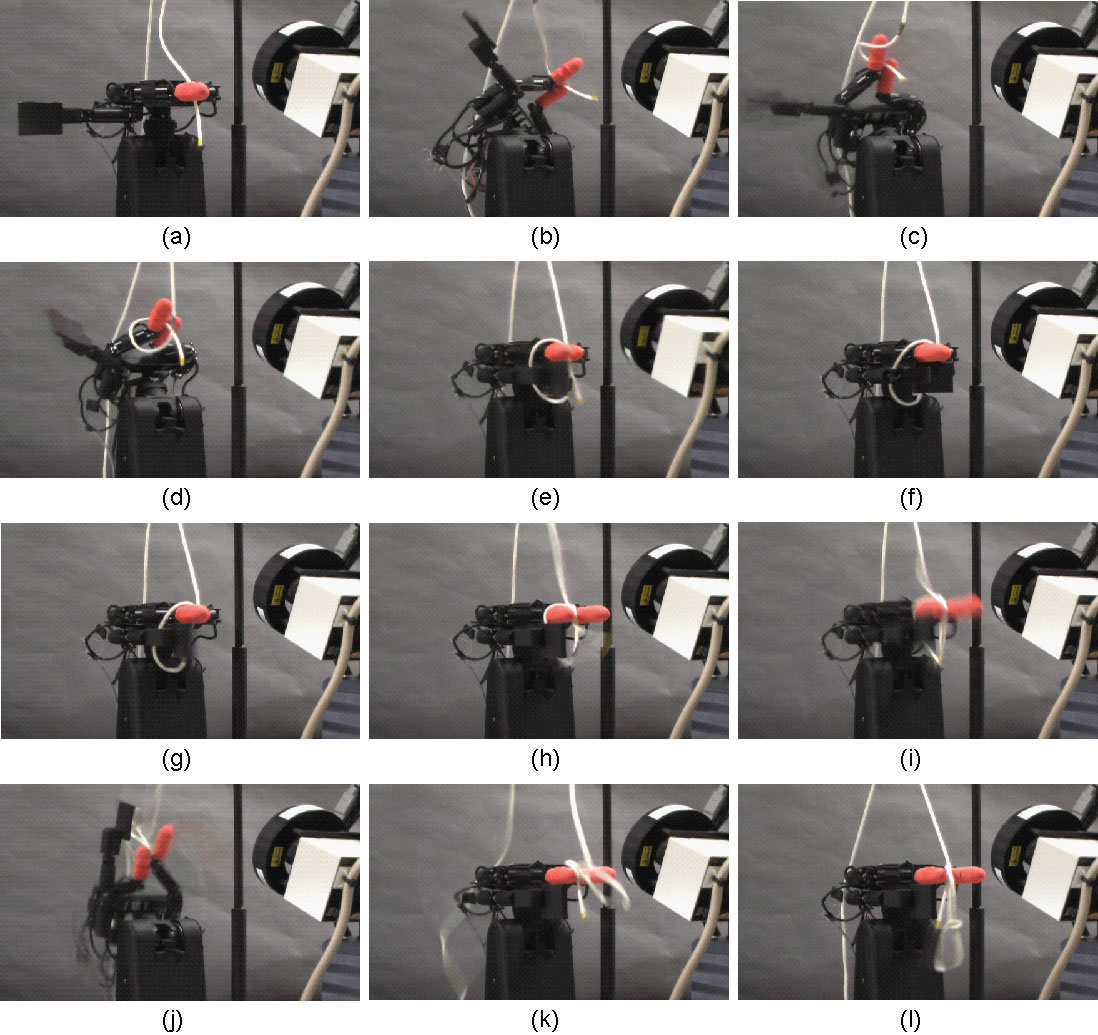
片手結びを実現することは極めて困難であり,また,片手結びを実現する技能が必要である. 片手結びを比較的容易に実現でき,片手結びの技能を抽出するために,人の片手結びを参考に, 紐結び動作を3つのスキルに分割している.そのスキルとは,①輪の作成,②紐の入替, ③紐の引抜である.①輪の作成において,高速ビジョンを用いて手首の旋回軸制御を提案し, 輪の作成の成功率を向上させている.さらに, ②紐の入替において紐が入替わる瞬間の両指の間隔を適切にするために,触覚センサの力情報を基に, 把持力制御を実現している.以上の技能とフィードバック制御により片手結びを実現している. 実験結果を下図に示す.
動画
- 高速カメラ映像(横)
- 輪の作成(視覚フィードバック)
- 紐の入替(触覚フィードバック)
参考文献
- 山川雄司,並木明夫,石川正俊,下条誠: 高速多指ハンドを用いた柔軟紐の片手結び, システムインテグレーション部門講演会/pp.744-745 (2006)
- 山川雄司,並木明夫,石川正俊,下条誠: 触覚フィードバックを用いた柔軟紐の高速片手結び, ロボティクス・メカトロニクス講演会2007/2A1-E08 (2007)
- Yuji Yamakawa, Akio Namiki, Masatoshi Ishikawa, and Makoto Shimojo: One-handed Knotting of a Flexible Rope with a High-speed Multifingered Hand having Tactile Sensors, 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems/pp.703-708 (2007)
- 山川雄司,並木明夫,石川正俊,下条誠: 高速視触覚フィードバックを用いた多指ハンドによる柔軟紐の操り, システムインテグレーション部門講演会/pp59-60 (2007)
- 山川雄司,並木明夫,石川正俊,下条誠: 多指ハンドと視触覚フィードバックによる柔軟紐の高速マニピュレーション, 第13回 ロボティクスシンポジア/pp.529-534 (2008)
- 山川雄司,並木明夫,石川正俊,下条誠: 高速多指ハンドと高速視触覚フィードバックを用いた柔軟紐の結び操作, 日本ロボット学会誌,Vol.27,No.9,pp.1016-1024 (2009)