


Knotting manipulation based on skill synthesis
Summary
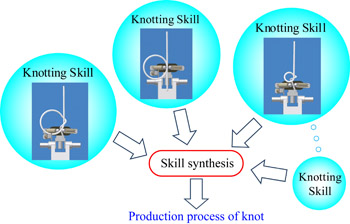
In the previous research ( One Handed Knotting of flexible rope using a High-speed Multifingered Hand), an overhand knot is achieved by high-speed multifingered hand. This knot is carried out by combining the three skills such as loop production, rope permutation, and rope pulling. Moreover, in order to improve the robustness of these skills, high-speed visual and tactile sensory feedback control method is proposed.
However, the general knotting production has not been suggested. Therefore, this research examines the relationship between a knotting process and the individual skills of which a robot hand is capable. To determine the necessary hand skills required for knotting, we first analyzed the knotting action performed by a human subject. We identified loop production, rope permutation, and rope pulling skills. To take account of handling of the two ends of the rope, we added a rope moving skill. We determined the characteristics of these skills using an intersection-based description. The knotting process was examined based on the analysis of knots and the characteristics of the robot hand skills.
As the description of the knot, the intersections that constitute the knot is considered. The intersection description can be obtained by following law.
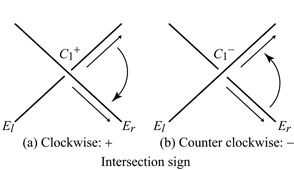
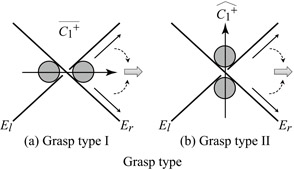
The production methods of two knots (overhand knot and half hitch) are shown.

|

|
Movies
References
- Yuji Yamakawa, Akio Namiki, Masatoshi Ishikawa and Makoto Shimojo: Knotting Manipulation by a Multifingered Hand based on Skill Synthesis, Proceedings of the 2008 JSME Conference on Robotics and Mechatronics/ 1P1-A09 (2008)
- Yuji Yamakawa, Akio Namiki, Masatoshi Ishikawa and Makoto Shimojo: Knotting Manipulation of a Flexible Rope by a Multifingered Hand System based on Skill Synthesis, Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems/pp. 2691/2696 (2008)
- Yuji Yamakawa, Akio Namiki, Masatoshi Ishikawa and Makoto Shimojo: Skill Synthesis Aimed at Knotting Rope by a Multifingered Hand, Proceedings of the 9th SICE System Integration Division Annual Conference (SI2008)/ pp. 329/330 (2008)
- Yuji Yamakawa, Akio Namiki, Masatoshi Ishikawa and Makoto Shimojo: Knotting Manipulation based on Skill Synthesis with Consideration of a Multifingered Hand Motion, Proceedings of the 14th Robotics Symposia/ pp. 331/336 (2009)