


ネットワーク型高速ビジョンによるトラッキング
概要
本研究では,一つのカメラの視野内に収まらない,複数のカメラの異なる視野にまたがって移動する対象をシームレスにトラッキングすることを目的とする. これにより,設置場所の固定されたアクティブビジョンのパン/チルトによる視野の移動よりもさらに広い視野を持つシステムの実現が可能になる.
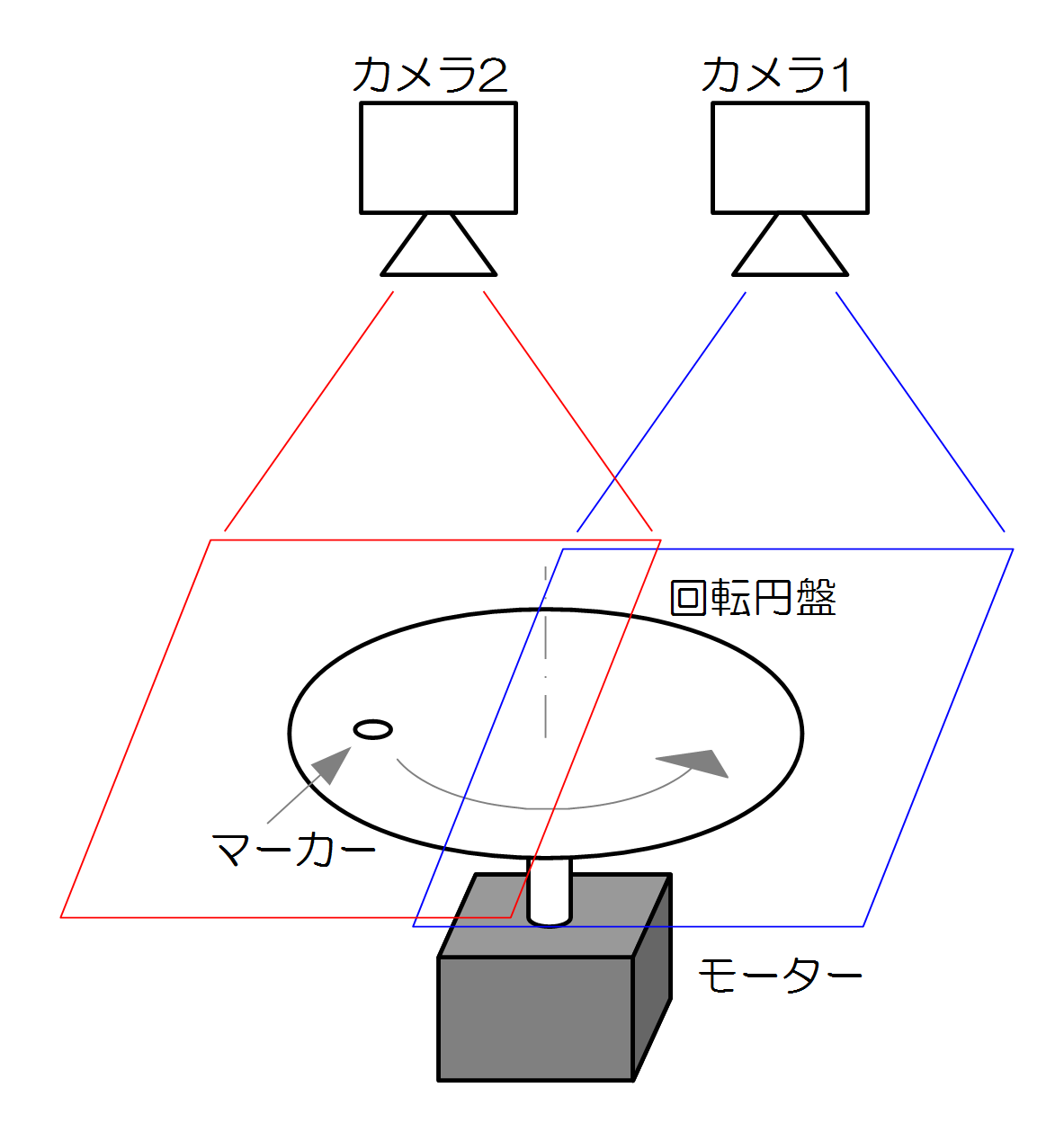
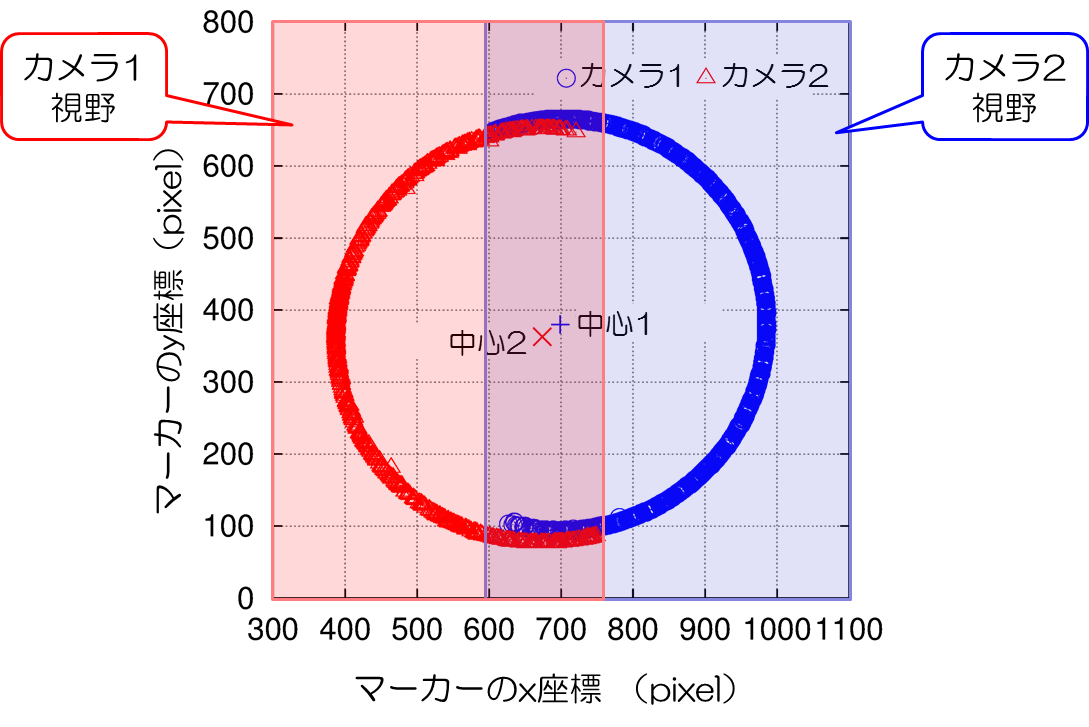
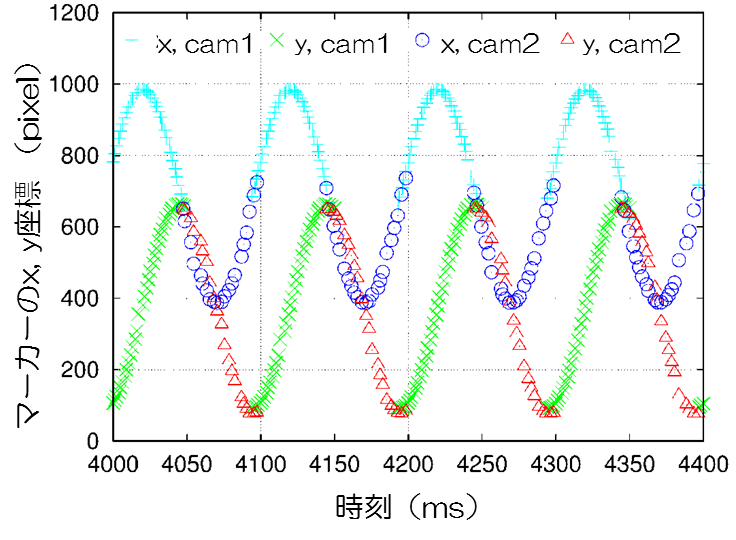
ネットワーク化された複数台の高速ビジョンセンサ によって,それらの視野内を高速に行き来する対象を追跡できる. 下の図は,視野の一部が重なるように設置した2台のカメラをネットワークで接続し,それらの視野をまたいで運動する対象の位置を計測した例である. 2台のカメラは事前に空間的にキャリブレーションされ,各カメラのフレームを取りこんで処理するPCの時計はPTPによって同期している.
高速に円運動するマーカーの位置を見失うことなく,視野の境界部においてもシームレスに追跡できている. 円盤の回転速度は毎秒10回転,マーカーの移動速度は2000 mm/s である.
いくつものカメラの視野にまたがって高速に移動する物体の追跡として,たとえば高速道路に沿って設置した高速ビジョンセンサ群によって,道路上の車をすべて見失うことなく追跡するなどの応用が考えられる.
参考文献
- 野田 聡人, 平野 正浩, 山川 雄司, 石川 正俊: ネットワーク化高速ビジョンシステムによる移動体の周辺環境認識, 第14回計測自動制御学会システムインテグレーション部門講演会論文集, pp. 1046-1048 (2013)
- Akihito Noda, Masahiro Hirano, Yuji Yamakawa and Masatoshi Ishikawa: A Networked High-Speed Vision System for Vehicle Tracking, 2014 IEEE Sensors Applications Symposium (SAS2014), Proceedings, pp.343-348 (2014)