


ホーム >
センサ フュージョン > 高速ビジョンのためのネットワーク構築
高速ビジョンのためのネットワーク構築
概要
これまでの研究開発により,高速ロボットの制御やヒューマンインタフェースへの応用を含め,様々なアプリケーションにおいて高フレームレートの視覚情報のフィードバックが有用であることを示してきた.
一方,計測システムの構成として,広範囲に分散した多数のセンサをネットワーク化することで,単一ないしは局所的なセンサデータからだけでは得られない情報を得るセンサネットワークという形態が重要性を増してきている.
本研究では,高速ビジョンをネットワーク化することで,その応用領域を拡大することを目的とする.
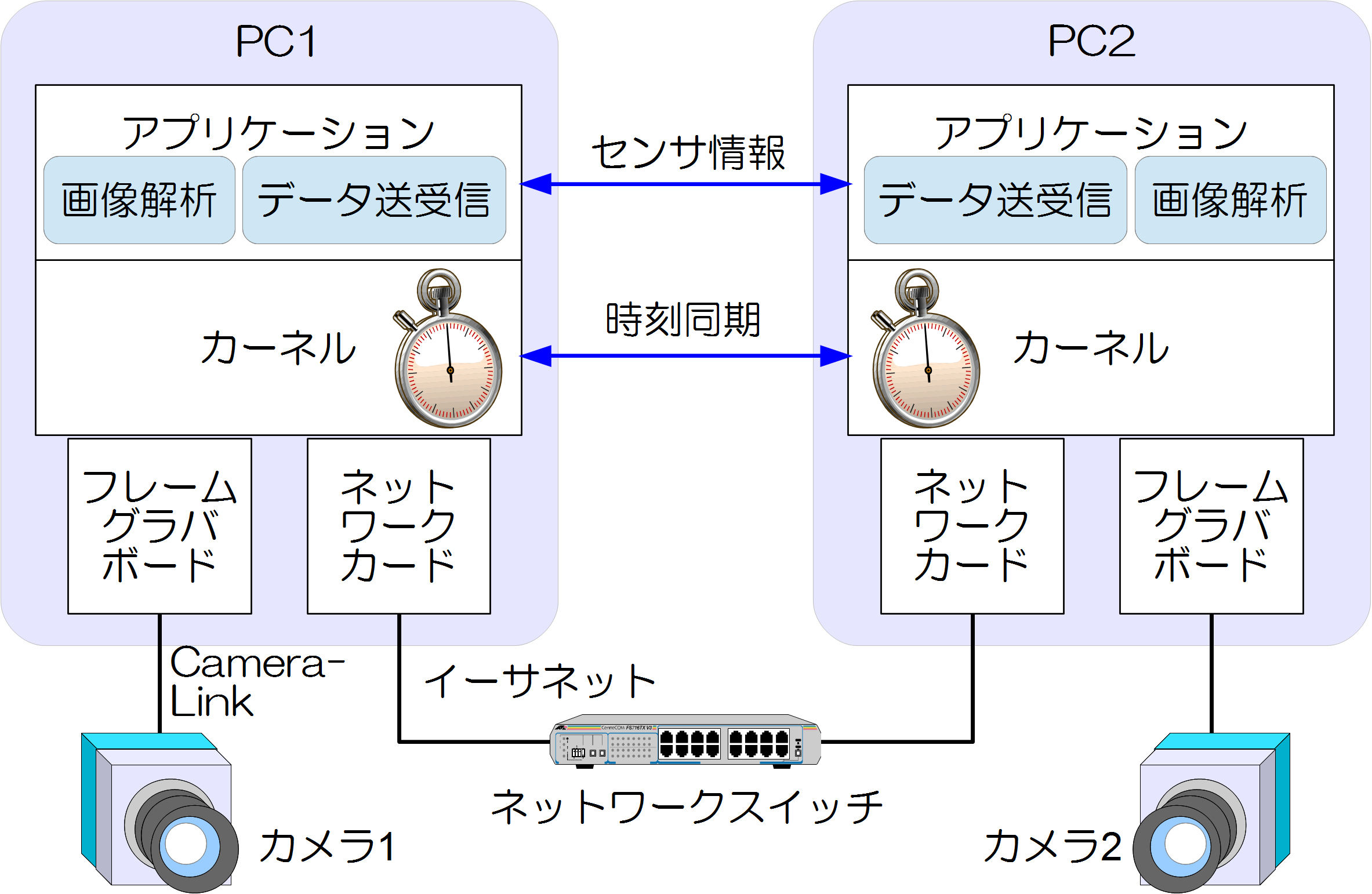
1,000fpsの高速ビジョンのフレーム間隔は1msであり,これに対してネットワーク遅延は必ずしも無視できるレベルに収まる保証はない. そのため,無視できないネットワーク遅延が存在しうること,パケットの到着順序が送出順序の通りにならないことを前提として,「その情報がいつ得られたものか」を明確にしてネットワーク上で共有される必要がある.つまり各ビジョンセンサにおいて,フレーム取得毎にデータにタイムスタンプを付与することが必要である.
しかし,ここで各センサノードが各自勝手な時計に基づいてタイムスタンプを付与すると,異なるノード間のデータを正しく時系列順に整列できない. このため,ネットワーク全体で参照される時計が統一されている必要がある.
この目的のために,IEEE 1588として標準化されているPresision Time Protocol (PTP)を導入し,高速ビジョンシステムのフレームレートに対し充分な精度(10μs以下)で時計を同期するシステムを構築した.

参考文献
- Akihito Noda, Yuji Yamakawa, Masatoshi Ishikawa: High-Speed Object Tracking Across Multiple Networked Cameras, Proc. 2013 IEEE/SICE International Symposium on System Integration (SII 2013), pp. 913-918 (2013)
- 野田 聡人, 山川 雄司 and 石川 正俊: "高速移動体追跡のためのネットワーク型高速ビジョンシステム", 電子情報通信学会技術研究報告 NS ネットワークシステム, pp. 77-80 (2014)