


Object Tracking Using Networked High-Speed Vision
Summary
This work aims to develop a networked high-speed vision system that can seamlessly track target objects moving across multiple cameras' fields of view. The system enables much wider tracking range compared to active (pan-tilt) cameras.
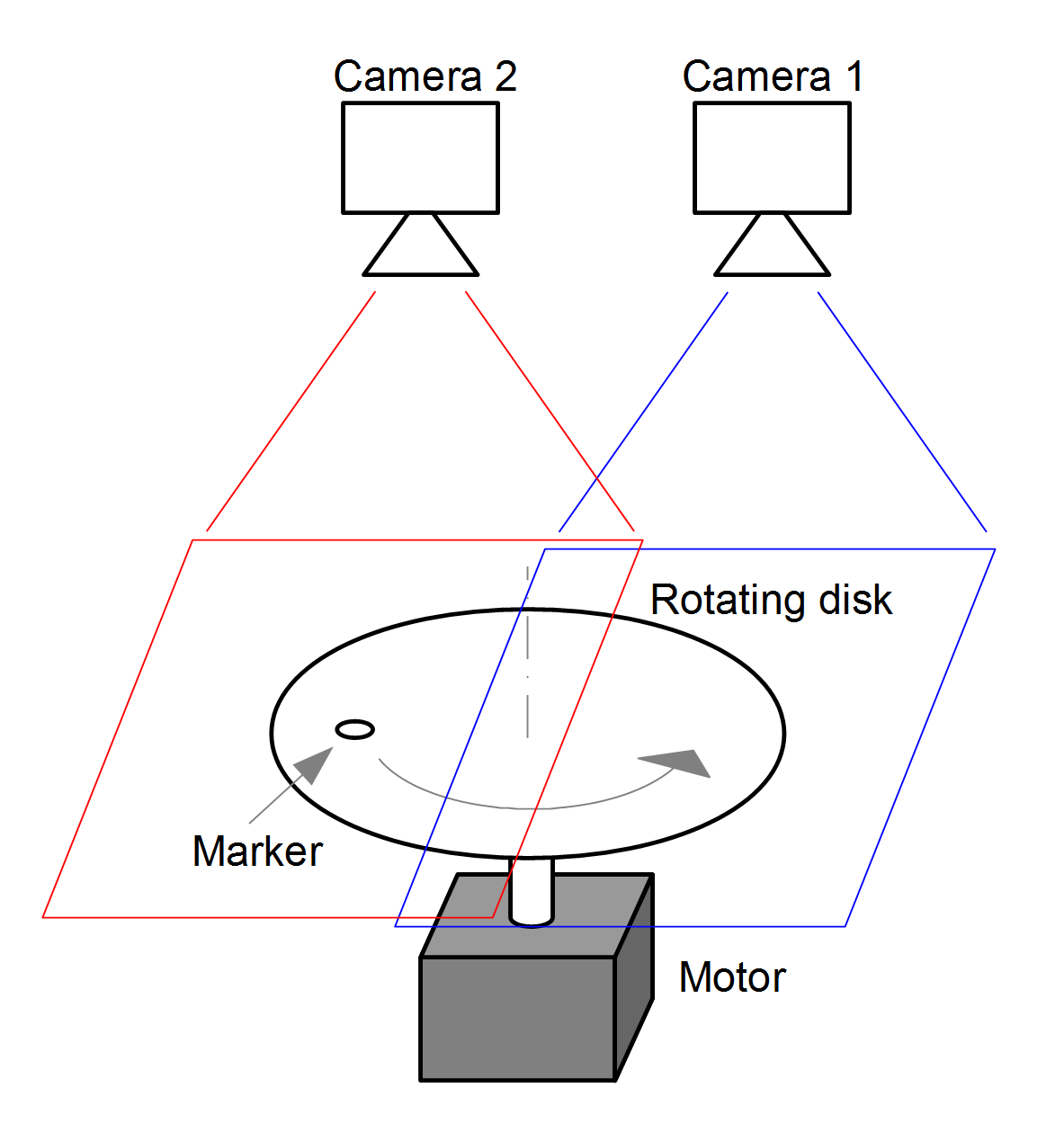
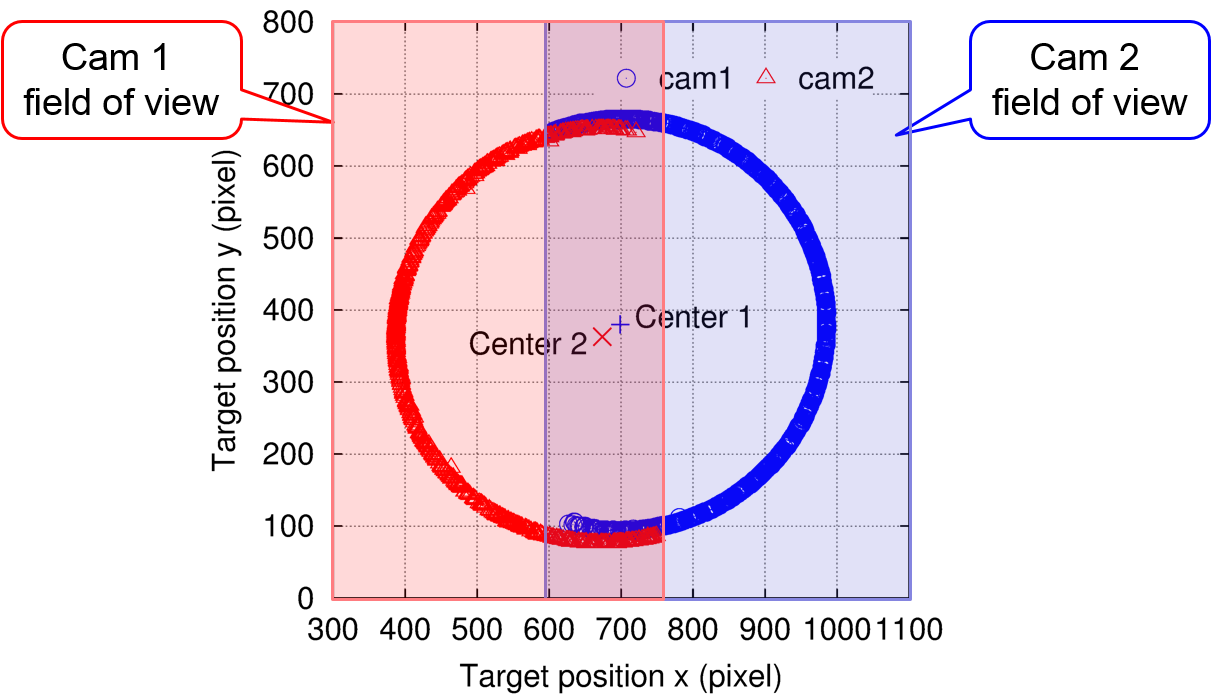
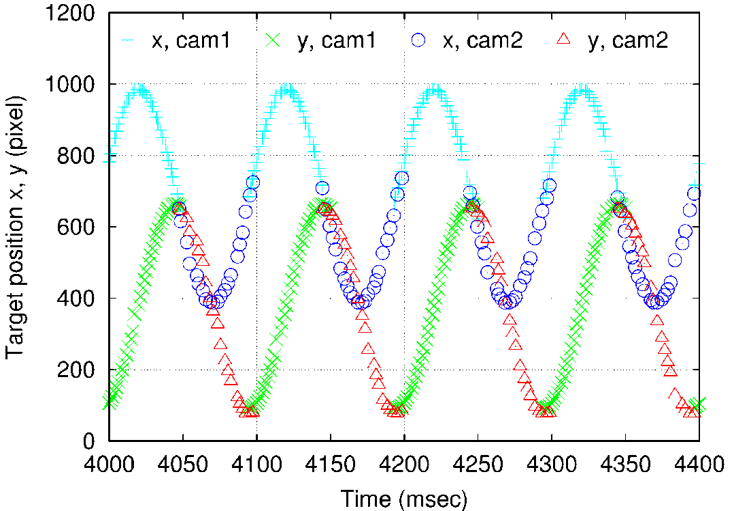
Multiple high-speed cameras connected with network enable tracking objects that move across the multiple fields of view at high-speed. The figures below show an experiment of networked high-speed ameras with partly overlapping fields of view. A small marker moving across the two fields of view was tracked and its position was measrued. The two cameras were spatially calibrated, and the timescales of PCs that acquire and process the images from the cameras are synchronized by PTP.
The marker moving at high-speed was seamlessly tracked without losing, even at the bondary of the fields of view. The rotation speed of the disk was 10 revolutions-per-second, and the marker moving speed was 2000 mm/s.
For example of a high-speed object that moves across numbers of cameras' fields of view, vehicle tracking along highway is one of possible applications.
Reference
- Akihito Noda, Masahiro Hirano, Yuji Yamakawa and Masatoshi Ishikawa: A Networked High-Speed Vision System for Vehicle Tracking, 2014 IEEE Sensors Applications Symposium (SAS2014), Proceedings, pp.343-348 (2014)