


Human-Robot Cooperation for Micrometer-Order Manipulation Using High-Speed Vision
Summary
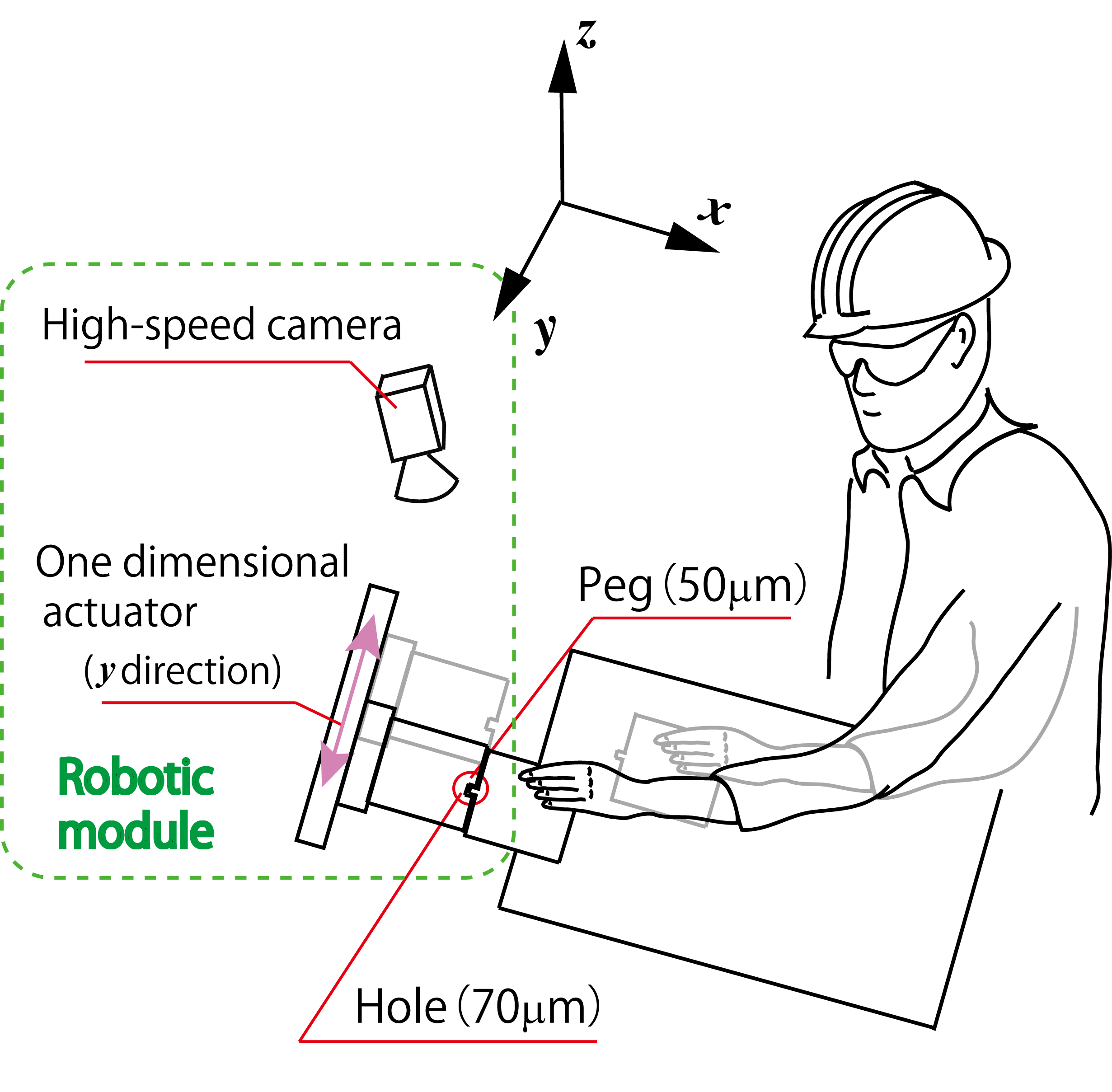
Usually, it is easy for humans to perform macro manipulations with visual feedback. However, due to poor visual acuity, it becomes difficult for humans to accurately perform micrometer-order manipulation. To solve this problem, we propose to improve the human manipulation performance through robotic cooperation by a high-speed robotic module. The robotic module consists of 1,000 fps high-speed vision and high-speed actuators to realize robust visual supervision and fine accommodation to human coarse manipulation. As a result, the system enables human to realize high precision manipulation while the workload can be reduced and the working efficiency can be improved. As a demonstration task, micrometer-order peg-and-hole alignment in two dimension is presented here. The 1-DOF robotic module drives the workpiece with hole (with a diameter of 70 μm) on it. It aligns the hole with the peg (with a diameter of 50 μm), which is held by the human, by adapting its position with micrometer-order accuracy.
This technology can be useful in many industrial applications. For example, it can be used in the precision assembly & fabrication industry to improve the production quality and efficiency of human workers. It also can be adopted in extreme work environments such as in outer space, where light or zero gravity hinders highly accurate human manipulation.
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .