


産業用ロボットを変革するDynamic Compensation(動的補償)
概要
従来の教示・再生による制御手法は,あらかじめ産業用ロボットに目標軌道をティーチングすることで,実現しやすいものの,教示誤差や工具の微細変動など外部からの不確定要素に対するロバスト性に欠けているようである,特に,複雑形状の対象軌道に対する教示作業は極めて困難である.一方,力センサや視覚センサなどを用いたリアルタイムフィードバック制御による軌道トラッキング手法は外部からの不確定な変動に対応することが出来ている.しかしながら,これらの手法においてロボット自身の不確定性に対するロバスト性は考慮されていない.また,ロボットの高速動作時でのダイナミクスによる不確定性が存在するため,高精度を実現するために,低い作業速度という制約があり,現実的な手法とは言い難いようである,そのため,高速度と高精度を両立でき,かつロボット自身の不確定性を補償する方法が必要である.
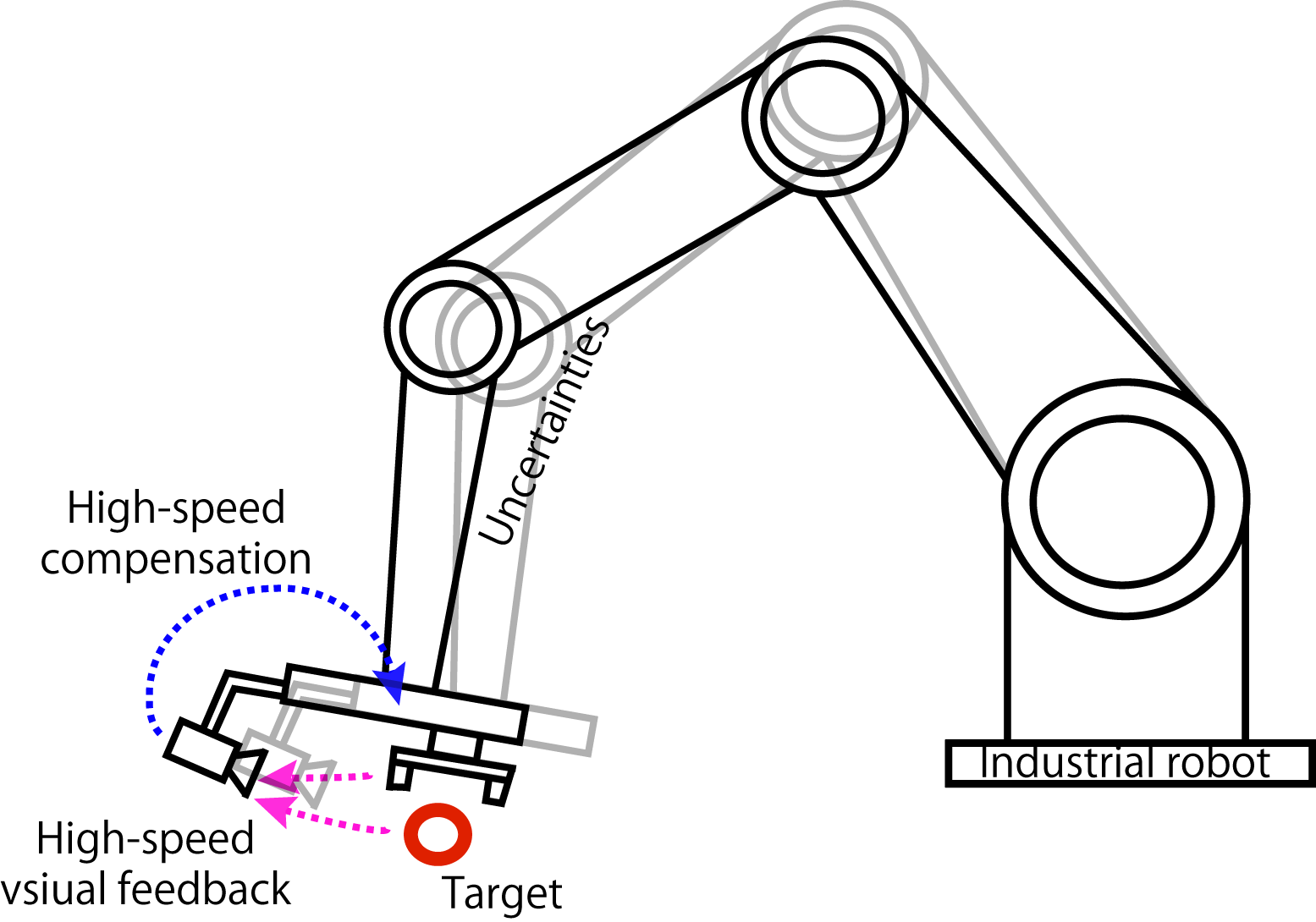
そこで本研究では,高速度と高精度の両立を実現するために,動的補償(Dynamic Compensation) コンセプトに基づいて,coarse-to-fine とした戦略を提案する.提案する戦略の方針として,以下二つのサブタスクに分け,並列で実行させる.
1) 一台の汎用の産業用ロボットが大範囲で大まかな位置決めを行う.
2) 高速高精度のロボットモジュール(高速アクチュエータおよび高速ビジョン)を産業用ロボットに搭載することにより,ローカルな高速ビジュアルフィードバックにより,上述した不確定性に対する補償を行う.
本手法は,産業用ロボットに対する教示・再生を行うものの,対象をカバーできるくらいの粗い教示だけで済むため,複雑形状の対象に対しても教示点数を大幅に減少することが可能であり,教示作業も大幅に軽減できる.さらに,人間による教示の代わりに,ビジュアルフィードバックで対象軌道に沿う粗い軌道の自動軌道生成の技術も今後開発する予定であり,従来の汎用産業用ロボットを外部センサでリアルタイムフィードバック制御するより,本手法の方が実現しやすく,安定性も高く,より現実的な手法と考えられる.
本研究の応用例として,高速かつ高精度の軌道トレーシング及び高速位置合わせ二つのタスクを実現した。 一台のパラレルリンクロボットを用いて,対象軌道に沿う粗い教示によって,高速な位置決めをさせながら,搭載した補償用ロボットモジュールが細かい誤差に対する補償を行い,高速かつ高精度の軌道トレーシング及び位置合わせを実現した. この技術を実現することにより,標準化したロボットモジュールを任意のロボットに搭載することで,既存のロボットを活用しつつ,作業速度と精度を大幅に向上させることが期待される.
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.