


Janken (rock-paper-scissors) robot with 100% winning rate (human-machine cooperation system)
Summary
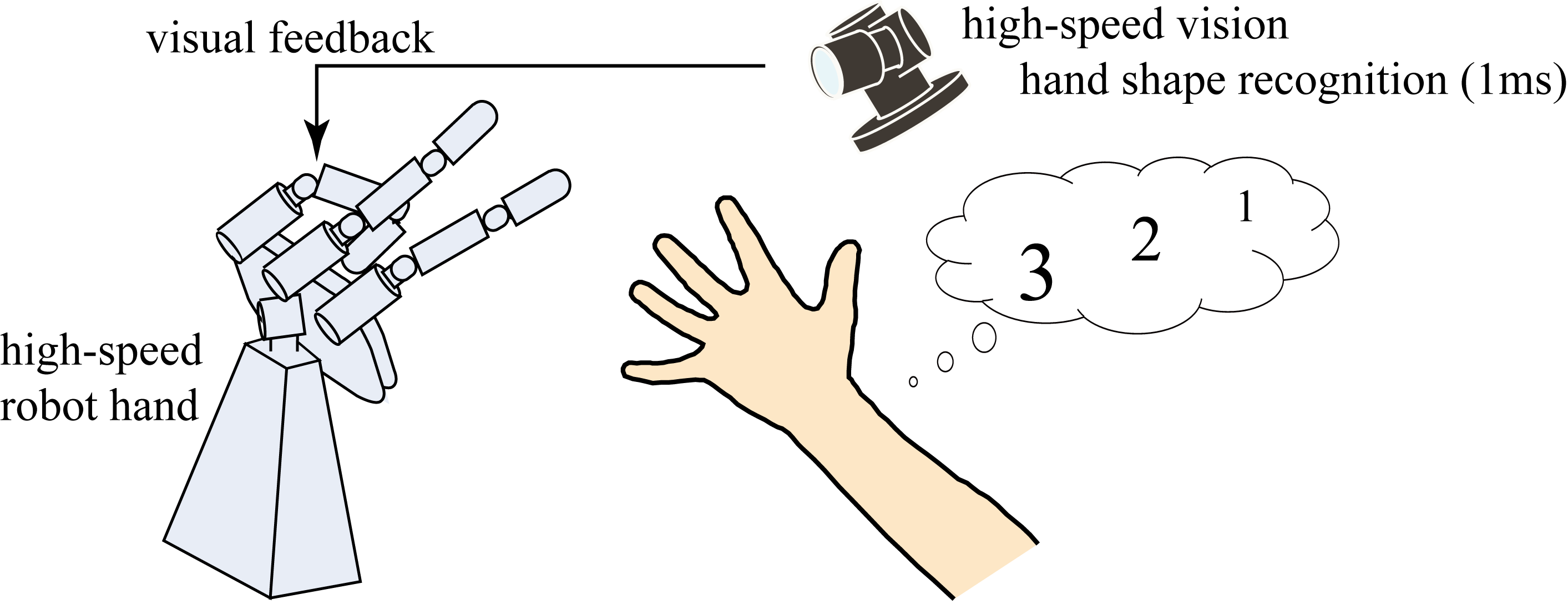
In this research we develop a janken (rock-paper-scissors) robot with 100% winning rate as one example of human-machine cooperation systems. Human being plays one of rock, paper and scissors at the timing of one, two, three. According to the timing, the robot hand plays one of three kinds so as to beat the human being.
Recognition of human hand can be performed at 1ms with a high-speed vision, and the position and the shape of the human hand are recognized. The wrist joint angle of the robot hand is controlled based on the position of the human hand. The vision recognizes one of rock, paper and scissors based on the shape of the human hand. After that, the robot hand plays one of rock, paper and scissors so as to beat the human being in 1ms.
This technology is one example that show a possibility of cooperation control within a few miliseconds. And this technology can be applied to motion support of human beings and cooperation work between human beings and robots etc. without time delay.
Considering from another point of view, locating factories oversea has been advantageous in labor-intensive process that requires human's eyes and hands because it is difficult to make the process automatic or it is not worth the cost. However, by realizing faster process than human's working speed, the productivity can be improved in regards to cost. Currently although the cost-cutting of the robot is difficult, it is possible to change the location condition of the factory fundamentally by increasing the speed of the robot including visual function.
Version 2
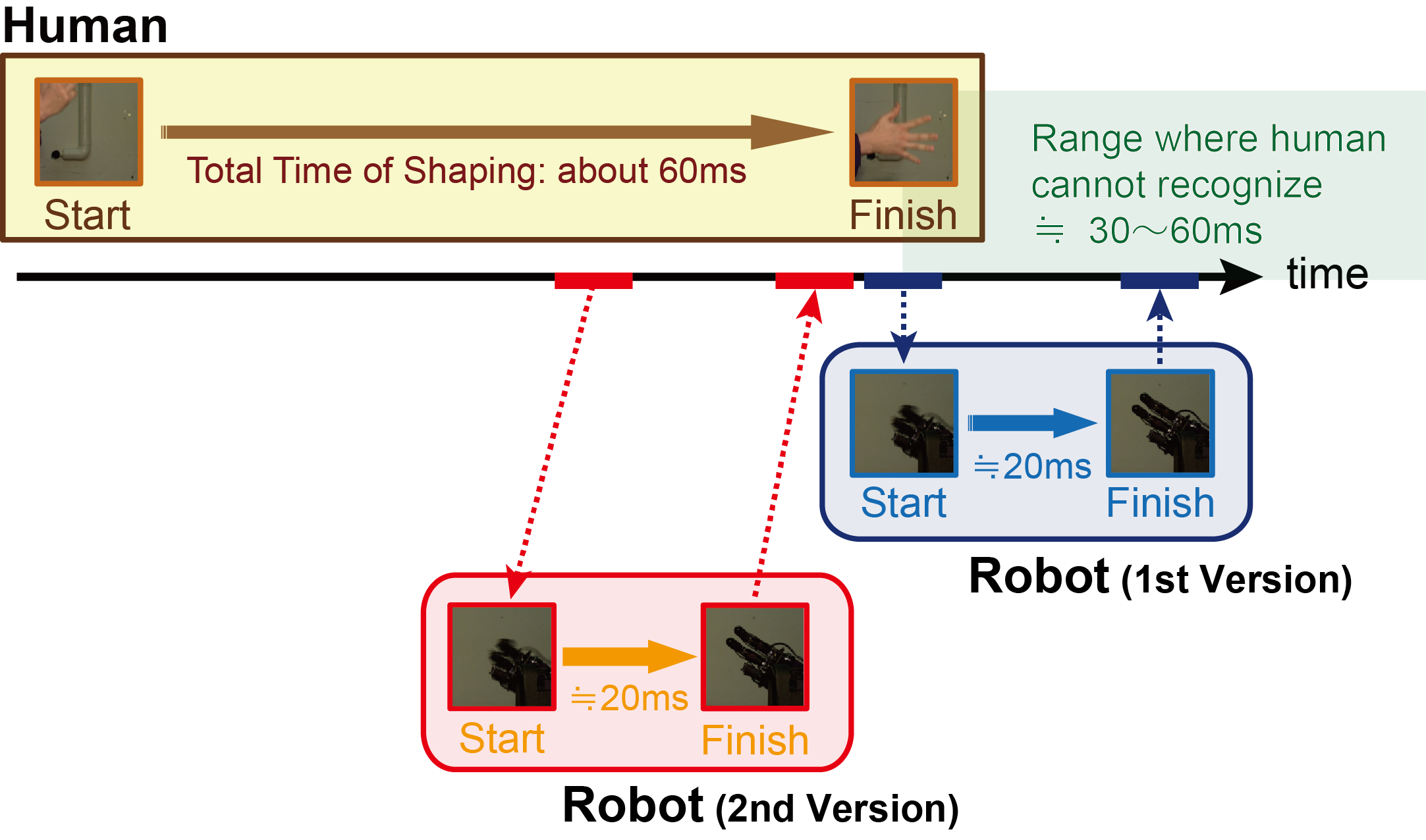
The second version of the janken (rock-paper-scissors) robot system with 100% winning rate has been developed. The robot realizes 100% winning rate by high speed recognition of high speed vision and high speed acuation of a robot hand. In the first version, a final shape of the robot hand is delayed about 20ms after the finished shape of a human hand. In the second version, a final shape of the robot hand is completed almost the same time of the finished shape of a human hand.
Version 3
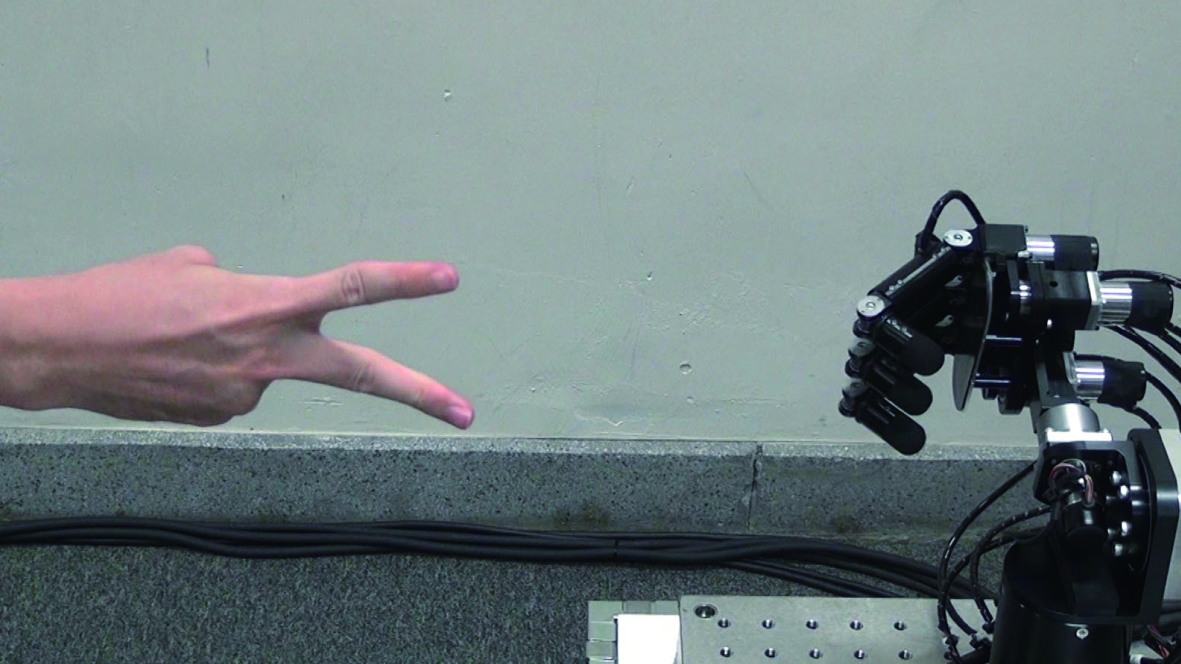
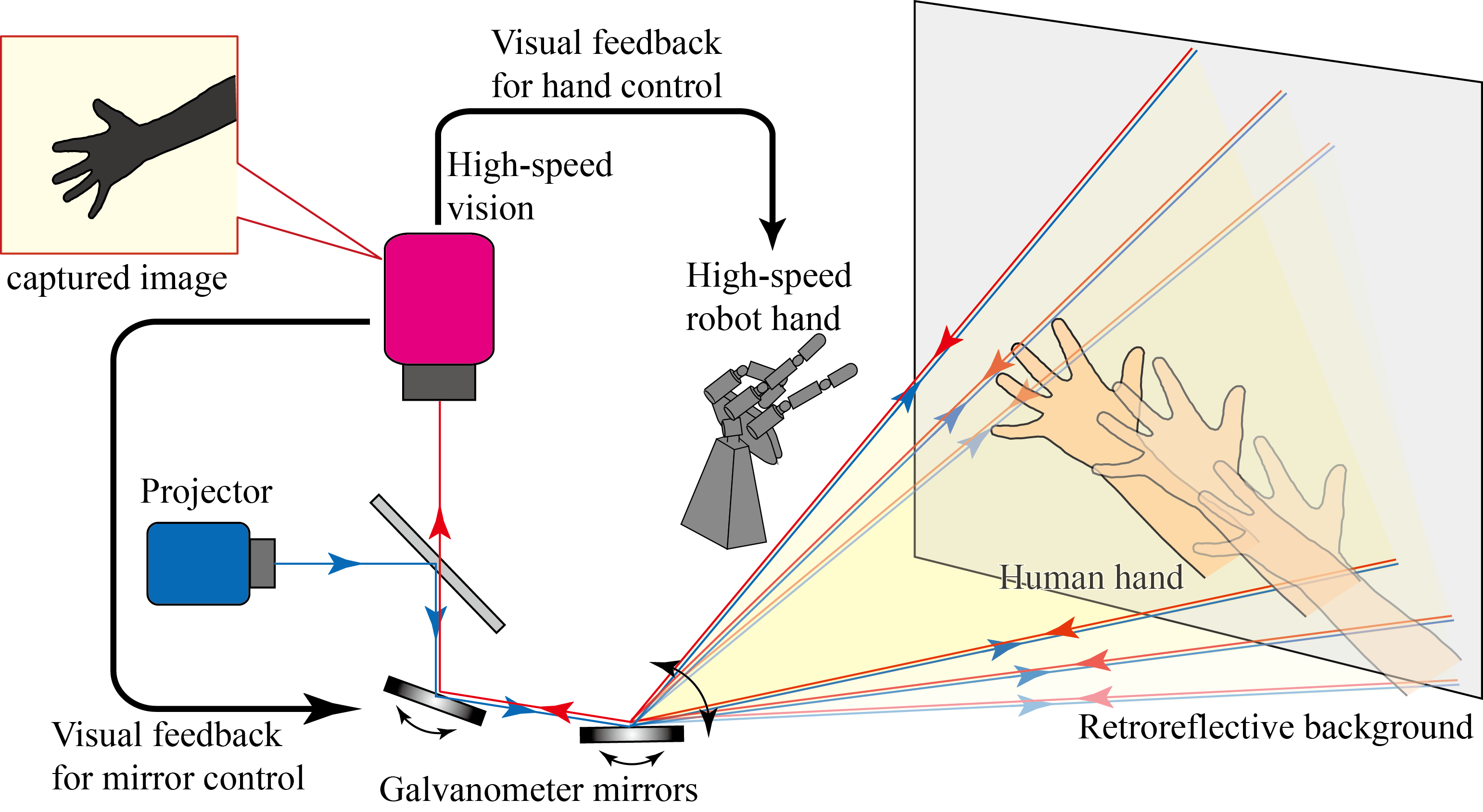
The third version of the Janken (rock-paper-scissors) robot with 100% winning rate has been developed. In this version, we incorporated the high-speed tracking technologies "1ms Auto Pan-Tilt" and "Lumipen 2" in order to extend a field of view of the high speed vision system. The inclusion of these technologies additionally enables the system to dynamically track the human hand and recognize its shape in high speed, regardless of where it moves, as well as improves the synchronization between the motion of the robot hand and that of the human hand. Using high-speed vision together with the high-speed actuation of the robot hand enables the robot to achieve a 100 % winning rate.
Name of robot
The name of this robot is "Janken (rock-paper-scissors) robot", and the abbreviated form is "Janken robot".
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
If you want to use the original video, please send an e-mail for copyright permission to contact .
If you want to use the original video, please send an e-mail for copyright permission to contact .