


Home >
Sensor Fusion >
Dynamic Holding Using a High-Speed Multifingered Hand
Dynamic Holding Using a High-Speed Multifingered Hand
Summary
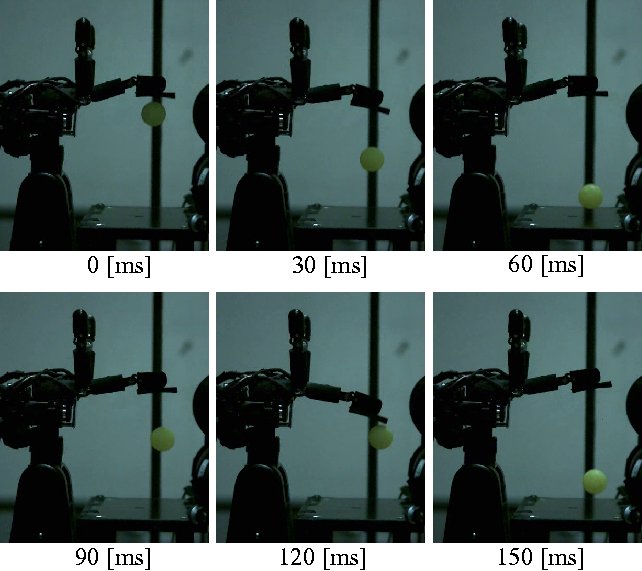
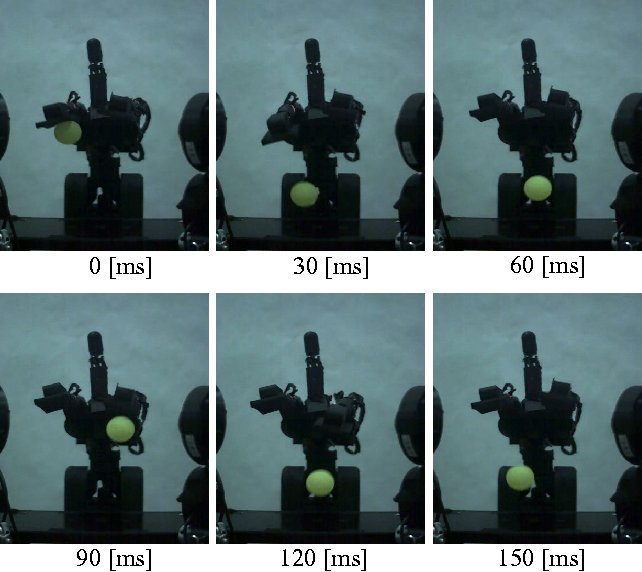
In order to achieve faster and more dexterous manipulations, we are proposing a strategy called "dynamic holding." In the dynamic holding condition, an object is held in a stable condition while the object is moving at high-speed. In this research, high-speed dribbling is achieved as an example of dynamic holding using a high-speed multifingered hand and a high-speed vision system.
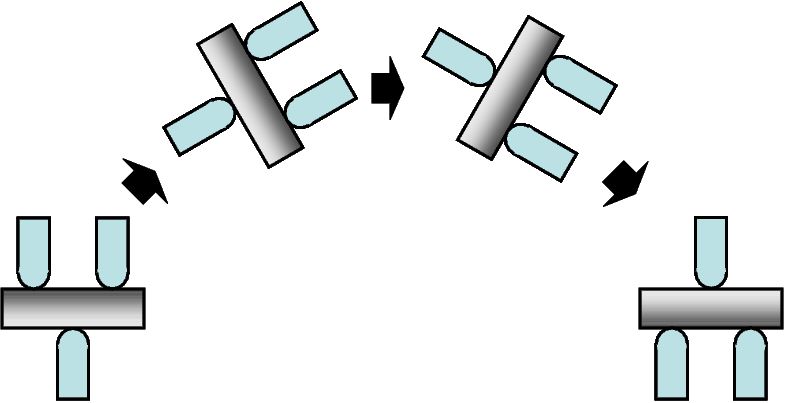 Static Holding |
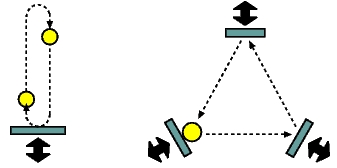 Dynamic Holding |
|---|
|
|
| One Finger Dribbling | Two Finger Dribbling |
Movies
Reference
- Daisuke Shiokata, Akio Namiki and Masatoshi Ishikawa. Robot Dribbling Using a High-Speed Multifingered Hand and a High-Speed Vision System, 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (Edmonton, 2005.8.5) / Proceedings, pp. 3945-3950.