


ACHIRES: 高速ビジュアルフィードバックによる, より安定な前傾走行
| ハードウェアと制御手法の両方を刷新することで,人間を超えた機械システムの限界を追求することを目標に, 高速ビジュアルフィードバックを用いた二足走行ロボットシステム”ACHIRES”(Actively Coordinated High-speed Image-processing Running Experiment System) を開発し, その第一ステップとして高速走行を実現しました. ACHIRESシステムの概要についてはこちらをご覧ください. |
概要
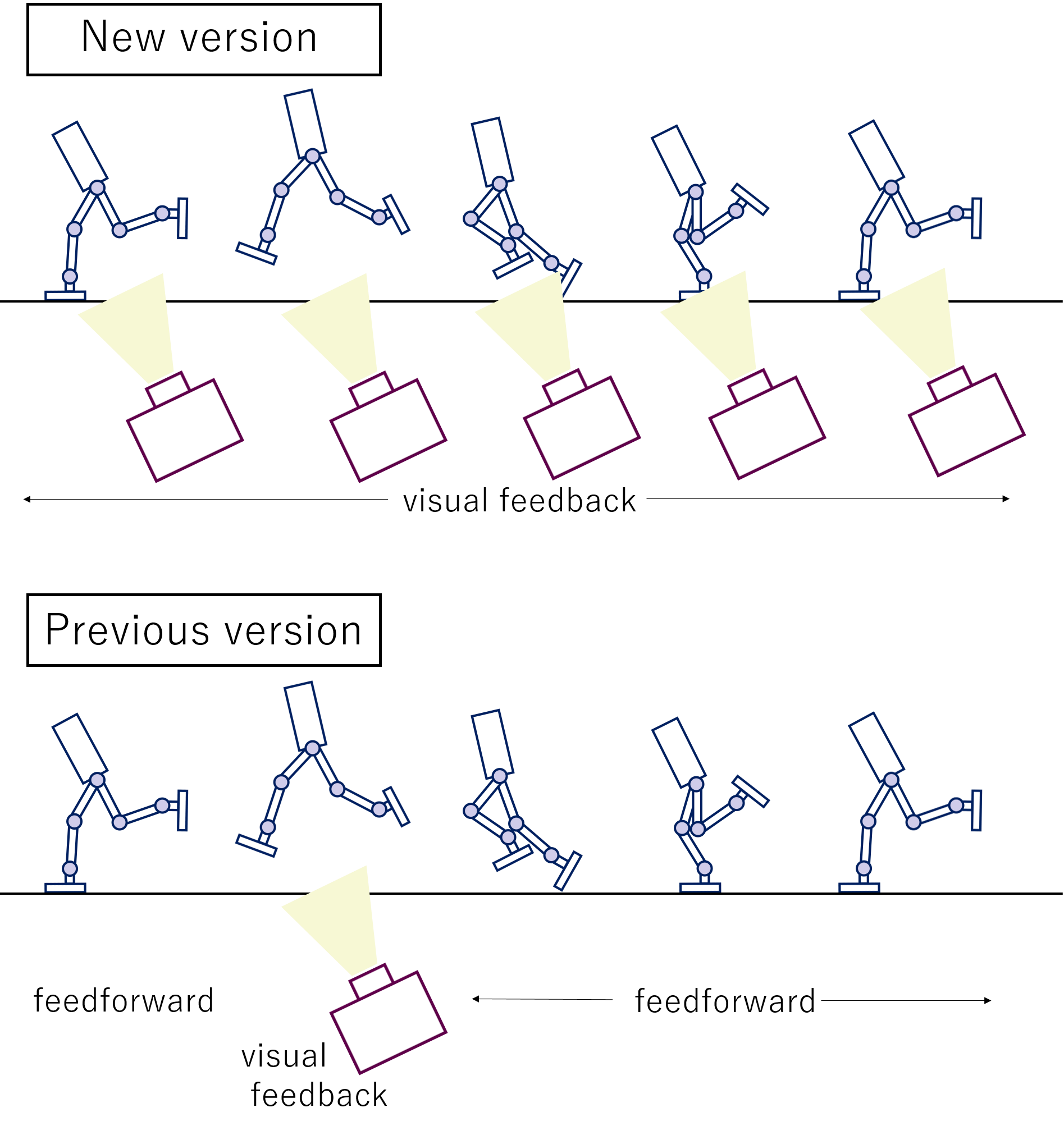
二足走行ロボットシステムACHIRESの走行手法を改良することで, これまでよりさらに安定で信頼性の高い走行が実現されました.
ACHIRESシステムは高出力軽量な二足ロボットと, それを外部から観測する高速ビジョンの組み合わせによって実現されています. これまでの制御手法では高速ビジョンによってリアルタイムに得られるロボットの姿勢の情報は, ロボットの両足が地面から離れている限られた期間にしか利用されていませんでした. 本研究では高速ビジョンの情報を走行のすべての過程に導入することによって, 人間のような前傾姿勢での走行を, より長い時間安定に継続することができるようになりました.
お知らせ
-
高速二足走行ロボットACHIRESと アクティブアシスタントロボットは東京ビッグサイトにて開催されました 2017国際ロボット展(11月29日(水) - 12月2日(土)) に出展いたしました.ご来場ありがとうございました.
 動画
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- 佐藤宏,山川雄司,妹尾拓,石川正俊:二足走行における高速ビジュアルフィードバックを用いた姿勢安定化制御,第18回システムインテグレーション部門講演会(SI2017),(仙台, 宮城, 2017.12.23)/講演論文集,pp.2591-2596 (2017).